Int-Ball2には本来の撮影ドローンとしての機能に加え、外部ユーザが作成したプログラムを搭載して軌道上で実験できる「技術実証プラットフォーム」としての機能も備えています。
メインミッションであるカメラ撮影機能はすでに定常運用に移行しており、2024年度からは技術実証プラットフォームの軌道上チェックアウトが開始されました。そしてこのたび、すべての検証タスクが無事に完了しました。
S. P. Yamaguchi, IEEE International Conference on Space Robotics (iSpaRo), 2024. [1]
1. タスクの繰り返し・自動化
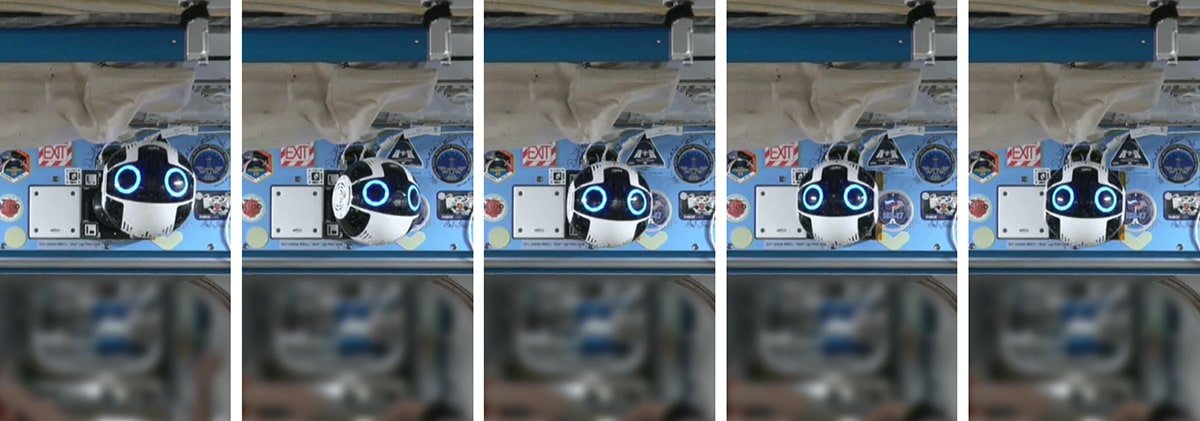
通常のカメラ運用では、地上管制からのコマンドによって遠隔操作を行っていましたが、技術実証プラットフォームを活用することで、地上からの指令を介さず、あらかじめ設定したタスクを自動で繰り返し実行できるようになりました。
この機能を検証するため、2024年12月24日に、Int-Ball2がドッキングステーションから繰り返し離脱・結合する動作を自動で実行し、ドッキング性能を定量評価するためのデータ取得を行いました。
2. 外部ユーザプログラムの読み込みと実行
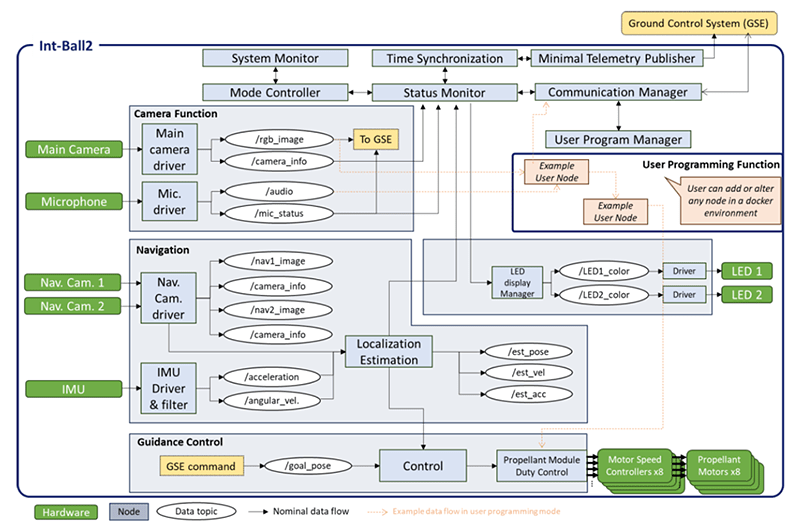
本プラットフォームにより、Int-Ball2の飛行制御プログラムを外部ユーザが独自に開発したアルゴリズムに置き換えて実行することも可能になります。
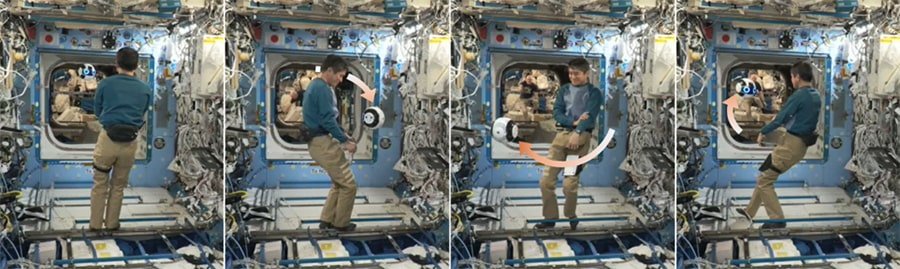
この機能の検証では、事前にプログラムされた飛行経路に沿って移動しながら、常に撮影ポイントにカメラを向ける高度な自律飛行撮影機能[2] を新たに組み込み、2025年3月26日に軌道上試験を実施しました(引用:X.com 大西卓哉 (JAXA宇宙飛行士)Takuya Onishi)。
3. OSに依存しない柔軟なプログラム実行
Int-Ball2のメインコンピュータにはLinux OSが搭載されていますが、技術実証プラットフォームでは、ユーザが自身のOS環境で構築したプログラムをInt-Ball2上で動作させることが可能です。
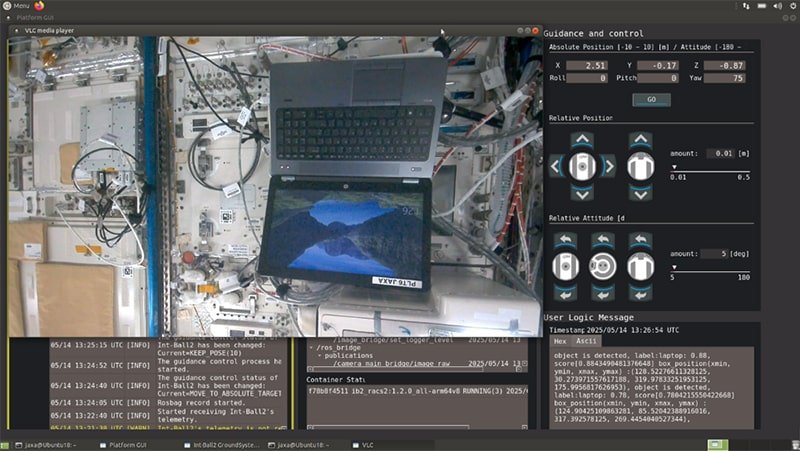
この柔軟性を検証するため、2025年5月14日に、宇宙用ソフトウェアフレームワーク「core Flight System(cFS)」と、地上ロボット用の「Robot Operating System(ROS)」を連携させるブリッジパッケージ「ROS and cFS System(RACS)」の軌道上実証を行いました[3]。
RACS2はInt-Ball2とは異なるOS環境で動作するソフトウェアですが、本プラットフォームを活用することでInt-Ball2に組み込むことができました。今回の実証では、人物やノートPCといった物体を検出する画像認識機能をInt-Ball2に追加し、RACS2経由で制御する構成での動作確認に成功しました(引用:研開WEBニュースのRACS)。
参考文献
[1] P. Yamaguchi et al., "Int-Ball2: ISS JEM Internal Camera Robot with Increased Degree of Autonomy – Design and Initial Checkout, " 2024 International Conference on Space Robotics (iSpaRo), Luxembourg, 2024.
[2] Nishishita et al., "Dynamic Motion Planning of FPV Camera Free-Flyers for Autonomous Crew Tracking and Collision Avoidance”, The 73rd International Astronautical Congress (IAC), 2022.
[3] Kato and T. Saito, “RACS2: the ROS2 and cFS System, launched”, Flight Software Workshop 2023.
関連リンク

-
 2025.11.25
2025.11.25- お知らせ
CALET10周年記念シンポジウムが行われました- 「きぼう」利用のご案内
-
 2025.11.14
2025.11.14- お知らせ
船内実験装置「立体培養容器(OCC)/ 自動溶液交換器具2型(T-DOCS)」を公開- 「きぼう」利用のご案内
-
 2025.11.14
2025.11.14- お知らせ
船内実験装置「細胞培養容器(DCC)/ 自動溶液交換器具1型(Auto-Ex1)」を公開- 「きぼう」利用のご案内
-
 2025.11.12
2025.11.12- お知らせ
「きぼう」利用状況と今後の予定(2025.10.27-2025.11.9)- 「きぼう」利用のご案内
-
 2025.11.11
2025.11.11- お知らせ
ガラスは「ネットワーク構造」がなくてもできる? ―「きぼう」静電浮遊炉で、酸化ランタン-酸化ニオブ系のガラス形成メカニズムの解明に一歩前進―- 「きぼう」利用のご案内
※特に断りのない限り、画像クレジットは©JAXA