2025.05.27
- お知らせ
第5回きぼうロボットプログラミング競技会(Kibo-RPC)日本代表チーム「Celestial-Ravens」に競技会参加について聞いてみました!
- 「きぼう」利用のご案内
- きぼうアジア利用推進室(KUOA)

皆さま、こんにちは。「きぼう」ロボットプログラミング競技会(Kibo-RPC)事務局です。
Kibo-RPCをご存知ない方に魅力をお伝えしたく、前大会にあたる第5回Kibo-RPCで日本代表に輝いたCelestial-Ravens(セレスティアル・レイブンズ、東京理科大学と早稲田大学の混合チーム)に参加のきっかけや学んだことなどお話を伺いました。
※インタビューはメールで行い、Celestial-Ravensの回答を掲載しています。
第5回Kibo-RPC日本代表に10の質問を聞いてみました!
10の質問
1)Kibo-RPCに参加したきっかけは?
もともと知人が過去にKibo-RPCに参加していて大会については認知していましたが、チャンネル登録していたJAXAのYouTubeで「Kibo-RPCチュートリアルビデオ:07画像認識プログラム」を視聴したことをきっかけに参加を決めました。
チームリーダーである藤田は、学部4年になり、ハイブリッドロケットとCanSatのサークルを引退したことから宇宙系のコンテストに参加したいという気持ちがあり、また研究でイメージセンサを扱うため周辺分野の画像処理についても学びたいというモチベーションもありチームを結成しました。

2)Kibo-RPCに参加したいけど、チームを集めるのが大変という声があります。どのようにチームメンバーを集めましたか?
ハイブリッドロケットやCanSatなど同じ宇宙系のものづくりサークルを経験したOBに声をかけてメンバーを集めました。
増岡は研究が電気系のハードウェア関連でありソフトウェアに関わりたいという気持ちや、これまでのロケットサークルのように仲間たちと切磋琢磨しエンジニアとして成長したいという気持ちで参加してくれました。
阿部はこれまで経験してきたCanSatと違い、競技としての歴が浅いKibo-RPCでは勝ちパターンが確立しておらず、本物の宇宙開発と同じように答え合わせの出来ない問いに考えを尽くす姿勢が求められ、また事前にテストできない環境である軌道上での動作を経験できるということに魅力を感じて参加してくれました。
増岡は研究が電気系のハードウェア関連でありソフトウェアに関わりたいという気持ちや、これまでのロケットサークルのように仲間たちと切磋琢磨しエンジニアとして成長したいという気持ちで参加してくれました。
阿部はこれまで経験してきたCanSatと違い、競技としての歴が浅いKibo-RPCでは勝ちパターンが確立しておらず、本物の宇宙開発と同じように答え合わせの出来ない問いに考えを尽くす姿勢が求められ、また事前にテストできない環境である軌道上での動作を経験できるということに魅力を感じて参加してくれました。
3)どのようにチーム内での役割分担を決めましたか?
責任範囲をはっきり大きく分けることを考えて役割分担を行いました。これはメンバーの役割を明確にすることでモチベーションを維持するため、多少作業が遅延しても他のメンバーに影響を与えないため、コミュニケーションコストを減らすためといった目的があります。
具体的には、プログラムの統括と画像認識、経路設計を藤田が、クォータニオンを使った正確な姿勢計算を増岡が、マルチスレッド化、シーケンス・例外処理のレビューといったタスクを阿部が担当しました。
具体的には、プログラムの統括と画像認識、経路設計を藤田が、クォータニオンを使った正確な姿勢計算を増岡が、マルチスレッド化、シーケンス・例外処理のレビューといったタスクを阿部が担当しました。
4)各自の役割で、工夫したことは?
藤田はプログラムの主担当でしたが、Kibo-RPCの参加経験や画像認識プログラムの経験は無かったので、最初から完全なスケジュールやシステム設計を組むことはできませんでした。
それでもスケジュールマネジメントとしてはダラダラ開発をするのではなく、型にはまってYouTubeのチュートリアルから始めて手を動かして感覚をつかみ、その場その場でしっかり計画を立てていくことを意識しました。
プログラムの設計についても継ぎ接ぎのコードになることなく、処理の内容や順序、パラメータの全てに根拠を持ち、適宜メンバー同士でレビューを行って品質を保証する意識がありました。
それでもスケジュールマネジメントとしてはダラダラ開発をするのではなく、型にはまってYouTubeのチュートリアルから始めて手を動かして感覚をつかみ、その場その場でしっかり計画を立てていくことを意識しました。
プログラムの設計についても継ぎ接ぎのコードになることなく、処理の内容や順序、パラメータの全てに根拠を持ち、適宜メンバー同士でレビューを行って品質を保証する意識がありました。

増岡は特に姿勢計算の理論に関するドキュメントを残したり、コード内のコメントや変数命名に気を配ったりしていました。
姿勢の表現方法や座標系が複数存在しどうしても複雑になってしまうため、それらのプログラム上での命名を分かりやすく統一していました。他にもJavadocにのっとったコメント以外に処理の目的や背景について適宜コメントをしており、理解しやすくなる工夫をしていました。
チーム開発としても他人が理解しやすく、さらに資料がまとまっていることで増岡自身も考えがまとまりやすくなり複雑な計算をコードにすることができました。
阿部は全体的なシーケンスの設計レビューを担当し、攻めたアイデアを出したりプログラムの抜け穴を指摘したりといったことをしていました。
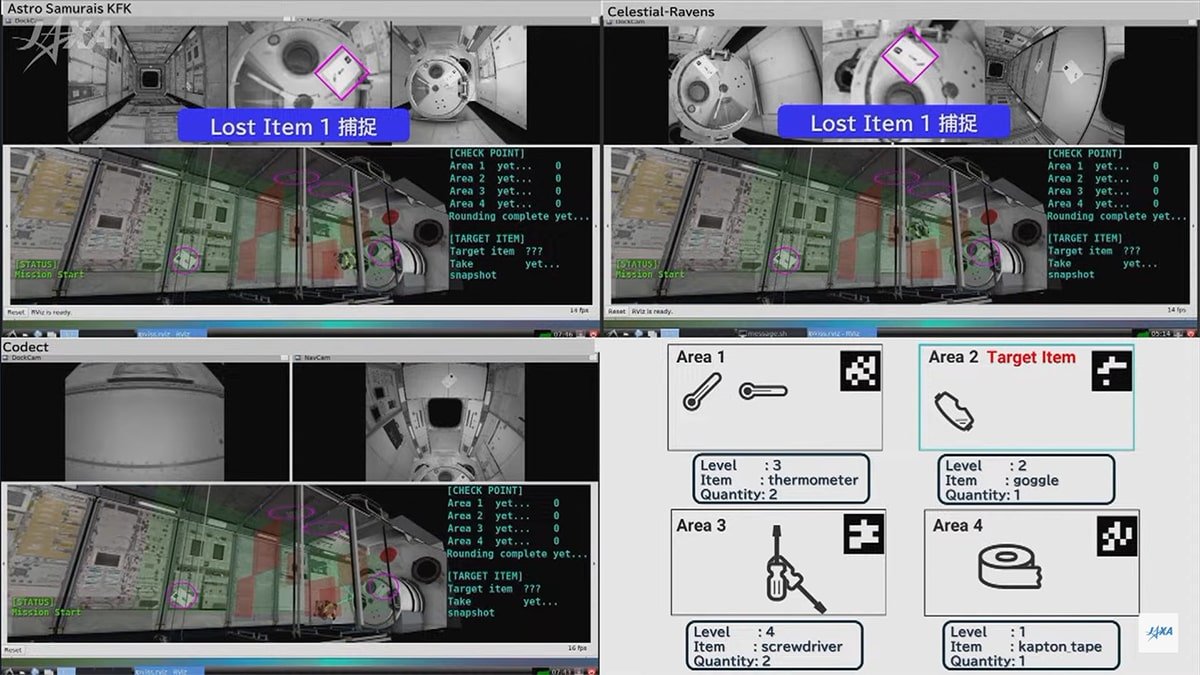
レビュアーが独立していることで斬新なアイデアを出しやすくなり、予選では複数のエリアを同時に撮影することで高速化を図り、大幅に時間点を稼ぐことができました。
さらに衛星のFDIR(Fault Detection, Isolation, and Recovery)のような視点でレビューを行い、例外処理についてブラッシュアップすることができました。
姿勢の表現方法や座標系が複数存在しどうしても複雑になってしまうため、それらのプログラム上での命名を分かりやすく統一していました。他にもJavadocにのっとったコメント以外に処理の目的や背景について適宜コメントをしており、理解しやすくなる工夫をしていました。
チーム開発としても他人が理解しやすく、さらに資料がまとまっていることで増岡自身も考えがまとまりやすくなり複雑な計算をコードにすることができました。
阿部は全体的なシーケンスの設計レビューを担当し、攻めたアイデアを出したりプログラムの抜け穴を指摘したりといったことをしていました。
レビュアーが独立していることで斬新なアイデアを出しやすくなり、予選では複数のエリアを同時に撮影することで高速化を図り、大幅に時間点を稼ぐことができました。
さらに衛星のFDIR(Fault Detection, Isolation, and Recovery)のような視点でレビューを行い、例外処理についてブラッシュアップすることができました。
5)3軸をマニュアルで確認するために手作りでAstrobeeを作っていましたが、これは誰のアイデアですか?また、どう役に立ちましたか?
藤田のアイデアで、Astrobeeの経路設計において姿勢のパラメータを計算するため、撮影ポイントを効率よく移動する経路を考えるために作りました。

プログラム上ではどの軸を中心に何度回転するのかというパラメータで姿勢を指定します。Astrobeeを目的の姿勢にしたいとき、姿勢からそのパラメータを直感的に得ることが難しく、座標軸を書き込んだ模型を、実際に手を動かすことで簡単にできるようになりました。
またAstrobeeの駆動力となるファンの位置も書き込んでおり、回転や移動を効率化するためにも使用できるようになっています。
座標軸を書き込んだものだけでなく、Astrobeeの外見を真似たものも作りました。経路設計に役立つこともありましたが、この模型は半分遊び目的です。
またAstrobeeの駆動力となるファンの位置も書き込んでおり、回転や移動を効率化するためにも使用できるようになっています。
座標軸を書き込んだものだけでなく、Astrobeeの外見を真似たものも作りました。経路設計に役立つこともありましたが、この模型は半分遊び目的です。
6)日本国内予選で優勝に結び付いた要因は何だと思いますか?
まず、プログラムの検証を何度も繰り返したことが一番にあげられます。藤田が衛星開発ベンチャーでインターンをしており、そこで開発体験と動作検証を大事にする文化が身についていたことで、それをKibo-RPCでも応用し結果を残すことができました。具体的にはシミュレーションの画像認識の単体テストの環境構築を行いました。
5th Kibo-RPCでは画像処理のプログラムが重要になっていましたが、画像処理のテストを行うためだけにプログラム全体をシミュレータで動かすのは時間がかかってしまうほか、同一の画像に対してアルゴリズムを変えて動作検証をすることが不可能です。そこでプログラムを開発するツールの上で画像処理のプログラムだけを実行する単体テストを行いました。オンラインシミュレータの自動実行により単体テスト用の画像を集めたうえで、膨大な回数のシミュレーションを繰り返し、プログラムを改善していったことが優勝に繋がったと思います。
5th Kibo-RPCでは画像処理のプログラムが重要になっていましたが、画像処理のテストを行うためだけにプログラム全体をシミュレータで動かすのは時間がかかってしまうほか、同一の画像に対してアルゴリズムを変えて動作検証をすることが不可能です。そこでプログラムを開発するツールの上で画像処理のプログラムだけを実行する単体テストを行いました。オンラインシミュレータの自動実行により単体テスト用の画像を集めたうえで、膨大な回数のシミュレーションを繰り返し、プログラムを改善していったことが優勝に繋がったと思います。


また、マネジメント面についてリーダーシップよりもメンバー全員のフォロワーシップが強かったことも優勝の一因と考えています。キャパシティの正直な開示や作業内容の細かい共有によりコミュニケーションや役割分担におけるトラブルがなく、プログラムの本質的な部分に集中して議論することができ、画像処理だけでなく姿勢系や全体のシーケンスの品質を向上できたと思います。
7)Kibo-RPCに参加して、成長したことや学んだことは?
Kibo-RPCのミッションを通して画像処理や3軸の姿勢計算について学ぶことができました。機械学習はライブラリを頼ったため古典的な画像処理を中心に手を動かしていましたが、これは機械学習の前後の処理として非常に重要でした。また、クォータニオンなど3軸の姿勢計算についても学ぶことができました。
さらに具体的な技術分野だけでなく、コードやドキュメントの整理能力、開発中の細かな情報共有についても良いトレーニングにもなりました。
さらに具体的な技術分野だけでなく、コードやドキュメントの整理能力、開発中の細かな情報共有についても良いトレーニングにもなりました。
8)Kibo-RPCに参加して、楽しかったことは?
なかなか思った通りに画像処理や姿勢計算ができないことがありましたが、試行錯誤を重ねてそれが成功することはとても楽しかったです。
また、画像処理や姿勢計算、戦略に注力するうえで、マネジメントスキルや基礎的なプログラミングスキルを活用することができ、これまでの経験が役に立っているという実感があり楽しむことができました。
個人開発ではなくチームで協力する必要がある他、大会として競争相手のチームがいるというのも良い刺激になりました。
また、画像処理や姿勢計算、戦略に注力するうえで、マネジメントスキルや基礎的なプログラミングスキルを活用することができ、これまでの経験が役に立っているという実感があり楽しむことができました。
個人開発ではなくチームで協力する必要がある他、大会として競争相手のチームがいるというのも良い刺激になりました。

9)Kibo-RPCの魅力もしくは参加して良かったことは何でしたか?
日本予選では膨大なシミュレーションによるアルゴリズムの改善により優勝することができましたが、軌道上決勝ではさらに大きな学びがありました。
実際のISSでプログラムを動かす軌道上決勝に向け、実環境を想定した画像処理、姿勢制御を安定させる経路設計、Astrobee実機の計算処理能力の確認、例外処理のブラッシュアップなど様々な対策を行いました。
実際のISSでプログラムを動かす軌道上決勝に向け、実環境を想定した画像処理、姿勢制御を安定させる経路設計、Astrobee実機の計算処理能力の確認、例外処理のブラッシュアップなど様々な対策を行いました。
決定的な敗因は、実環境を想定し明るさの変化に強い画像処理アルゴリズムにしたところ、実際のカメラのノイズに弱くなってしまいアイテム認識ができなくなってしまったというものです。事前にスマートフォンのカメラで撮影した画像で試験を行っておりノイズに弱いということは分かっていましたが、相当暗い環境でない限り問題にならなかったためそのままにしてしまっていました。ノイズ耐性について定量的な評価を行い、軌道上で適切な判断ができるアルゴリズムにすべきだったと反省しています。
考えすぎることなくある程度シンプルにするべきという思想もありますが、あらゆるリスクを定量的に評価したうえで結果的にシンプルな設計にするのとは明らかに異なり、これを目指していかなければいけないと実感しました。
また、画像処理が完璧でも優勝は不可能でした。予選では効率を重視した最短経路を辿っていましたが、決勝では実機の制御誤差やカメラの性能を考えて余裕をもった経路にしたり、Astrobeeのファン配置を考慮して制御が安定するシンプルな回転軸にしたり高速移動が可能な並進方向を決めたりといった工夫をしていました。
しかしこちらもシミュレーション通りの最短経路を攻めたチームが優勝していました。このトレードオフに関しては画像処理よりもデータによる判断が難しく、事前にテストができない環境を目の当たりにした形となり、今後乗り越えていかなければならない壁だと強く感じました。
考えすぎることなくある程度シンプルにするべきという思想もありますが、あらゆるリスクを定量的に評価したうえで結果的にシンプルな設計にするのとは明らかに異なり、これを目指していかなければいけないと実感しました。
また、画像処理が完璧でも優勝は不可能でした。予選では効率を重視した最短経路を辿っていましたが、決勝では実機の制御誤差やカメラの性能を考えて余裕をもった経路にしたり、Astrobeeのファン配置を考慮して制御が安定するシンプルな回転軸にしたり高速移動が可能な並進方向を決めたりといった工夫をしていました。
しかしこちらもシミュレーション通りの最短経路を攻めたチームが優勝していました。このトレードオフに関しては画像処理よりもデータによる判断が難しく、事前にテストができない環境を目の当たりにした形となり、今後乗り越えていかなければならない壁だと強く感じました。
10)Kibo-RPCへの参加を検討している方へのメッセージをお願いします
Kibo-RPCは各国予選で1位にならないとISSでの軌道上決勝に進めない大会であり、なかなか狭き門と考えていらっしゃるかもしれません。しかし私たちが最も成長できたのは優勝した時ではなく決勝で負けてその原因を分析した時です。失敗から学ぶということに大きな価値があり、失敗する権利は優勝チームだけでなく本気で取り組んだ参加者全員にあるものです。
完全にソフトウェアだけの大会で気軽に参加できるだけでなく、コンテストという失敗が許される貴重な環境ですが、ただ無計画に失敗しても何も得られません。ぜひKibo-RPCにじっくりと取り組み、将来に役立つ経験をしてもらえればと思います。
完全にソフトウェアだけの大会で気軽に参加できるだけでなく、コンテストという失敗が許される貴重な環境ですが、ただ無計画に失敗しても何も得られません。ぜひKibo-RPCにじっくりと取り組み、将来に役立つ経験をしてもらえればと思います。

Celestial-Ravensの皆さん、ご回答いただきありがとうございました!
今回、Celestial-Ravensのチームワークの良さや、創意工夫をしながら試行錯誤を繰り返して国内予選を勝ち抜き、決勝大会に臨まれたというのが印象的でした。結果にこだわらず、そこから学んだことを活かしていこうとする姿勢は素晴らしいと思います。
彼らの体験から、Kibo-RPCは宇宙開発の楽しさや難しさなど体験でき、プログラミングだけでなく、チームワークやコミュニケーション、論理的思考力など社会で役立つスキルを学べる良い教育の機会でもあると改めて感じました。
今回、Celestial-Ravensのチームワークの良さや、創意工夫をしながら試行錯誤を繰り返して国内予選を勝ち抜き、決勝大会に臨まれたというのが印象的でした。結果にこだわらず、そこから学んだことを活かしていこうとする姿勢は素晴らしいと思います。
彼らの体験から、Kibo-RPCは宇宙開発の楽しさや難しさなど体験でき、プログラミングだけでなく、チームワークやコミュニケーション、論理的思考力など社会で役立つスキルを学べる良い教育の機会でもあると改めて感じました。
ご参考:Kibo-RPCとは
Kibo-RPCとは、Kibo Robot Programming Challengeの略で、日本語では「きぼう」ロボットプログラミング競技会と名付けられ、国際宇宙ステーション(ISS)の「きぼう」日本実験棟内にあるドローンロボットを使ったアジア・太平洋地域の学生向けのプログラミング競技会です。
2020年に開始し、当初は7か国・地域の学生が参加しました。以来、参加国・地域は拡大して世界規模となり、昨年は国連加盟国を含め35か国・地域から学生が参加しました。そして、2025年には第6回を迎えました。
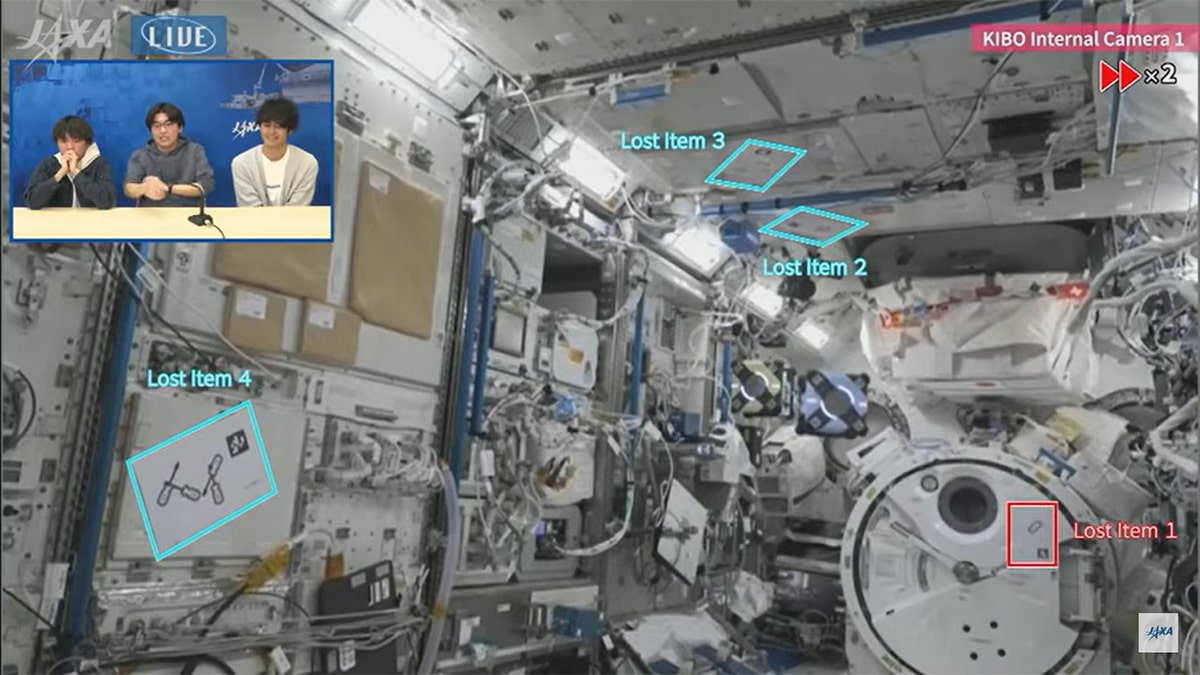
毎年参加している常連チームも楽しめ、初めて参加するチームでも不利にはならないように、毎回、違うストーリーで競技を行います。第6回Kibo-RPCは、宇宙海賊IB 1世(Int-Ball the First)がISS内に隠した財宝をドローンロボットの画像認識機能を使って探す宝探しです。
2020年に開始し、当初は7か国・地域の学生が参加しました。以来、参加国・地域は拡大して世界規模となり、昨年は国連加盟国を含め35か国・地域から学生が参加しました。そして、2025年には第6回を迎えました。
毎年参加している常連チームも楽しめ、初めて参加するチームでも不利にはならないように、毎回、違うストーリーで競技を行います。第6回Kibo-RPCは、宇宙海賊IB 1世(Int-Ball the First)がISS内に隠した財宝をドローンロボットの画像認識機能を使って探す宝探しです。

Kibo-RPCは学生限定(年齢不問)の3~8名でチームを組織し、プログラミングスキルを競う大会です。参加チームは戦略を練り、Java言語を使ってNASAのドローンロボット「Astrobee」を操作し、ストーリーに沿った探し物を見つけ出します。国内予選ではシミュレータ上で探し当てる正確さやスピード等を競い、優勝したチームは、日本代表としてISS上のAstrobeeを実際に操作し、世界の強豪と戦います。
なお、国内予選はJAXA筑波宇宙センターでの現地参加とオンライン参加のどちらでも可能です。国内予選終了後には、ワークショップをはじめ、JAXA職員や東京大学教授による特別講演も行っています。さらに現地参加者は、JAXAの施設見学、JAXA職員や専門家、他の参加者との交流会にも参加できます。


この競技会に参加することにより、学生はプログラミング言語や技術だけでなく、チームワークの大切さ、リーダーシップ、STEM(科学、技術、工学、数学)、戦略的思考、創造性、英語、宇宙環境などについて学ぶことができます。


関連ニュース
-
 2025.10.24
2025.10.24- お知らせ
ポストISSへの取組みとして船内実験装置「宇宙実験ロボティクス実証設備(TUSK)」を公開- 「きぼう」利用のご案内
-
 2025.10.20
2025.10.20- お知らせ
「きぼう」初の宇宙実験 "マランゴニ対流" を解き明かす―基礎から応用までを網羅した書籍を刊行―- 「きぼう」利用のご案内
-
 2025.10.20
2025.10.20- お知らせ
アジアントライゼロG 2025の実験器具が打ち上げられます!- きぼうアジア利用推進室(KUOA)
- 「きぼう」利用のご案内
-
 2025.10.15
2025.10.15- お知らせ
「きぼう」利用状況と今後の予定(2025.9.29-2025.10.12)- 「きぼう」利用のご案内
-
 2025.10.14
2025.10.14- お知らせ
「きぼう」から超小型衛星3機放出に成功!- 「きぼう」利用のご案内
※特に断りのない限り、画像クレジットは©JAXA