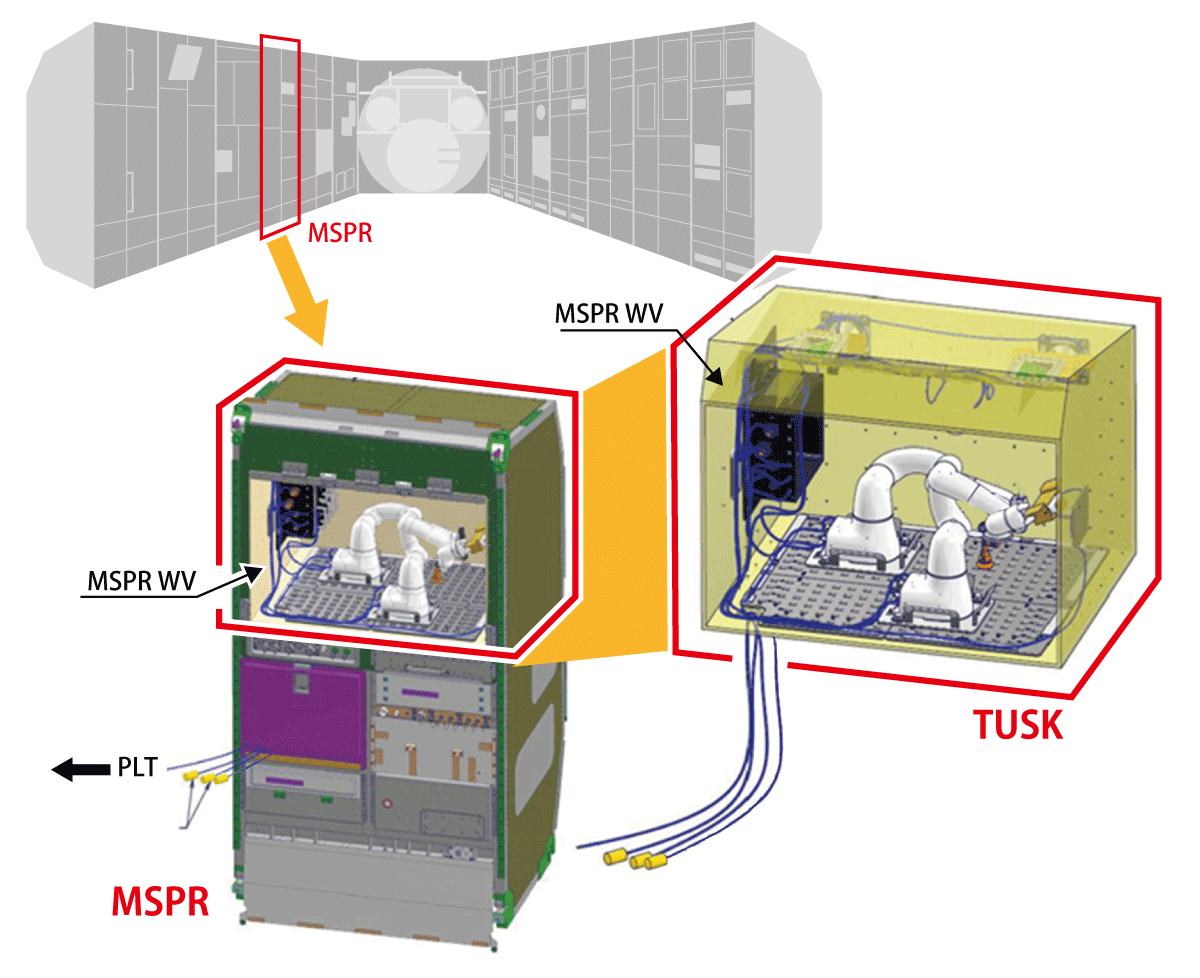
は、国際宇宙ステーション(ISS)の「きぼう」日本実験棟に設置される、実験自動化のための試験設備です。このシステムは、多目的実験ラック(MSPR)内にロボットを搭載し、宇宙飛行士が行ってきた作業や、人の手では難しい精密な操作を自律的に実行できるようにすることを目的としています。これにより、有人作業の負担を減らし、より高度な実験を安全かつ効率的に進めることが可能になります。
TUSKでは、利用者が地上で独自に作成した動作プログラムをJAXA担当者と共に事前に評価したうえで、軌道上で実行し、微小重力環境下での技術実証や新しい実験に取り組むことができます。地上での開発資産を活かしながら、宇宙という特殊環境での技術検証が行える点が大きなメリットです。
新しい実験手法や装置の評価、将来の宇宙探査に向けた自動化技術の開発など、幅広い応用が期待できます。
装置の特徴
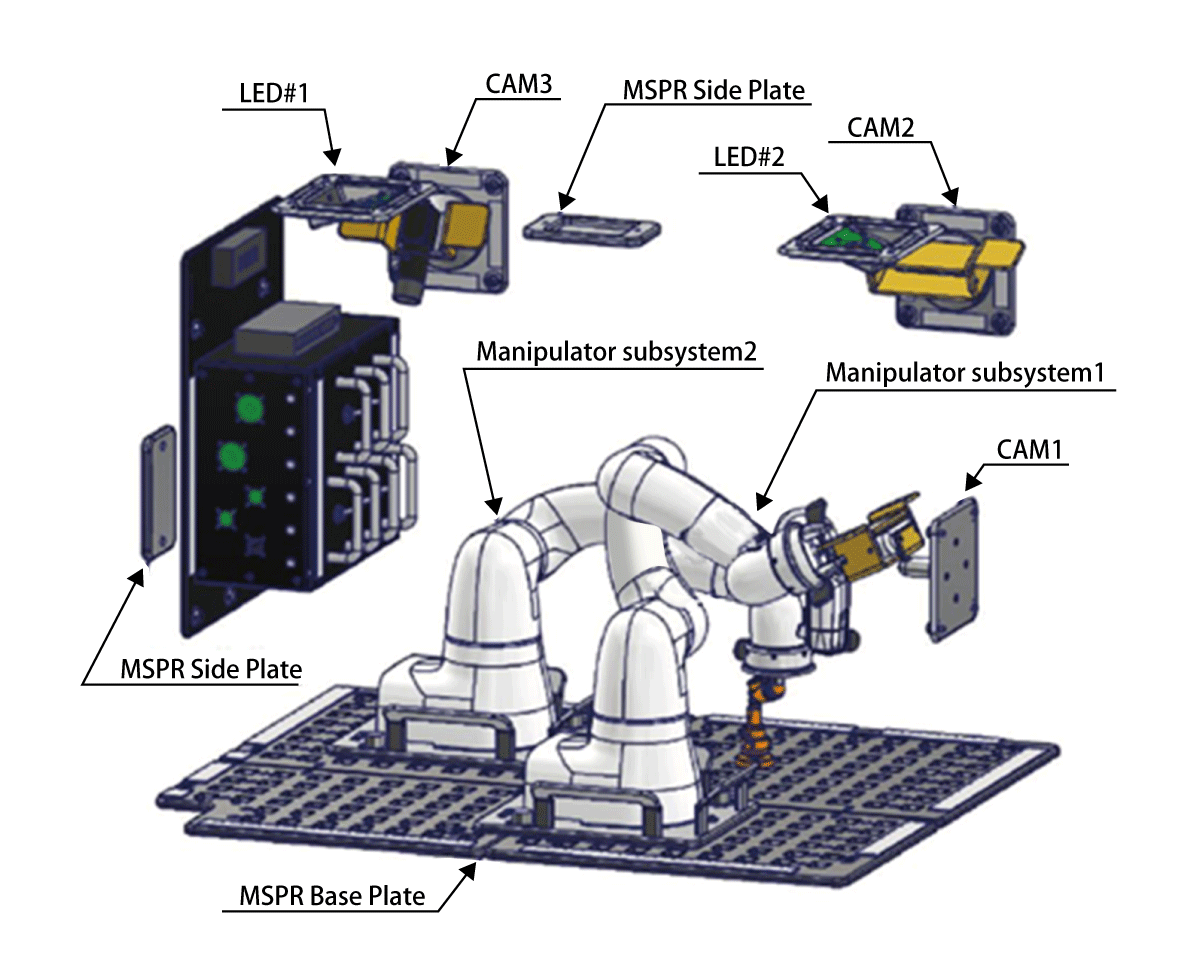
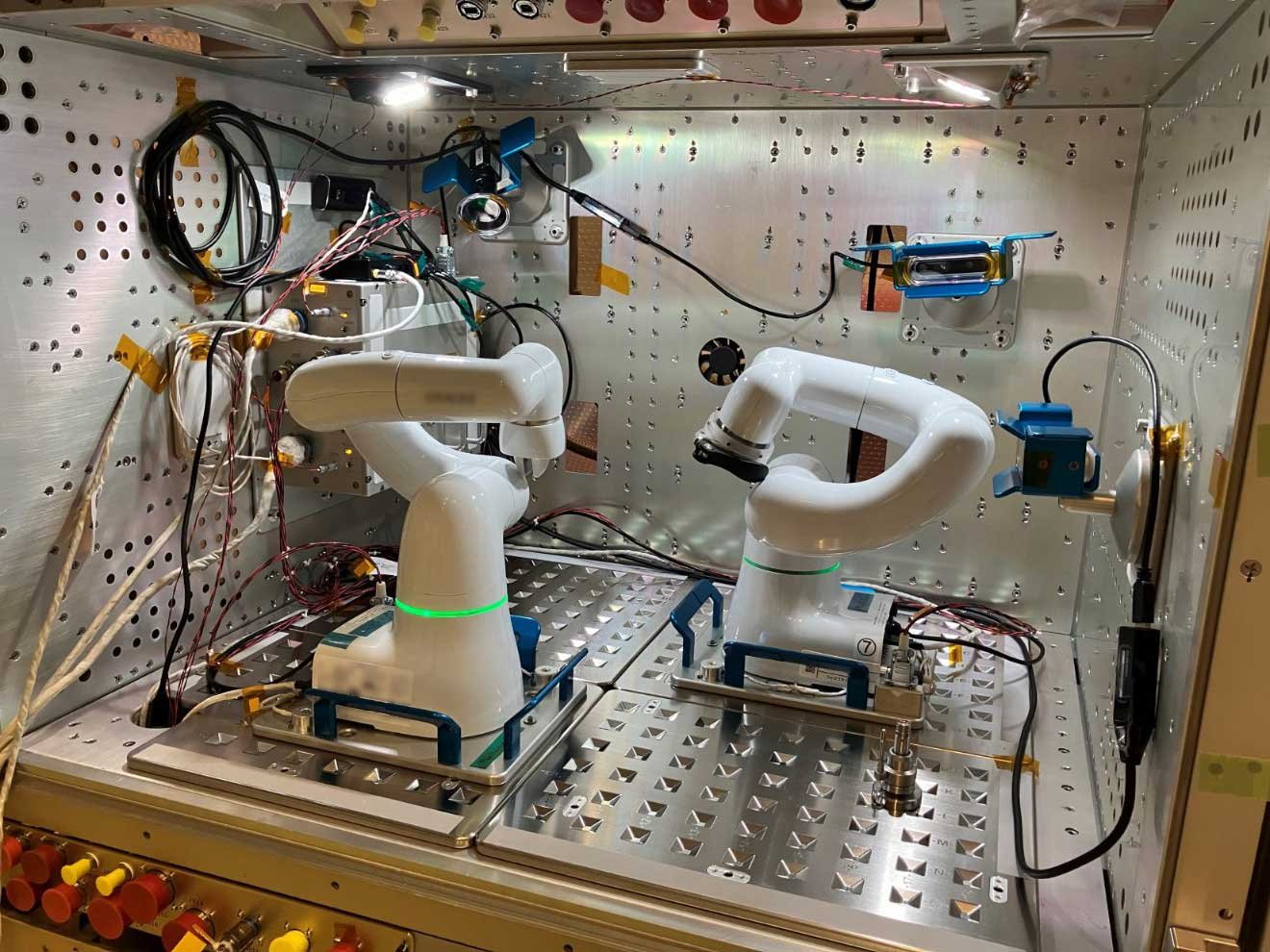
TUSKではMSPR ベースプレートに電磁マグホルダを用いたマグネットでの固定方式を採用しています。ロボットの設置位置をベースプレート上のディンプルと嵌合させることで、位置決めをしながら柔軟に設置位置を変更できます。カメラはマニピュレータによって角度調整が可能な設計となっており、作業途中でも撮像環境の変更が可能です。
また、マニピュレータ先端に取り付けるエンドエフェクタは、専用の取り付けプレートにより簡単に交換可能です。設計データをもとに開発した専用エンドエフェクタも、ネジやボルトを使用せずに装着できます。
TUSKの構成品の多くは地上でも使用されている製品が多く採用されています。動作プログラムなども、地上で用いられるプログラムツールを用いて開発することが可能です。
構成品を用いて疑似環境を構築することができ、地上モデルを用いた検証にも対応している為、これまで宇宙に設置されたロボットシステムと比較し、非常に利用しやすいシステムになっています。
TUSKに用いられているマニピュレータはROS(Robot Operation System)に対応しており、ROSなどで開発したソフトウェアモジュールと連携させることが可能です。また、マニピュレータの標準言語で開発されたプログラムであれば、そのまま利用することができます。
※ ROSとは、ロボットアプリケーションの構築を支援するオープンソースのソフトウェアライブラリとツールのセットです。
より詳細な情報が必要な場合は、お問い合わせください。
お問い合わせ
TUSK利用のミッション紹介
| ミッション略称 | 搭載機 | 期間(年度) | 開発 | 利用形態 |
|---|---|---|---|---|
| ▷ TUSK PM | HTV-X1 | 2025 | JAXA | JAXA利用 |



