
ローバーによる移動探査で
月の水の利用可能性を調査
⽉極域探査機(Lunar Polar Exploration: LUPEX 【呼称:ルペックス】)は、⽉の⽔資源が将来の持続的な宇宙探査活動に利⽤可能か判断することを⽬的としています。ローバーによって⽉⾯を移動しながら、搭載される観測機器によって様々なデータを取得します。複数の地点で掘削し、レゴリスを採取して、どの場所にどの程度の量の⽔が存在しているのかを調べます。
ローバー搭載観測機器
ローバーには以下の観測機器を搭載予定です。
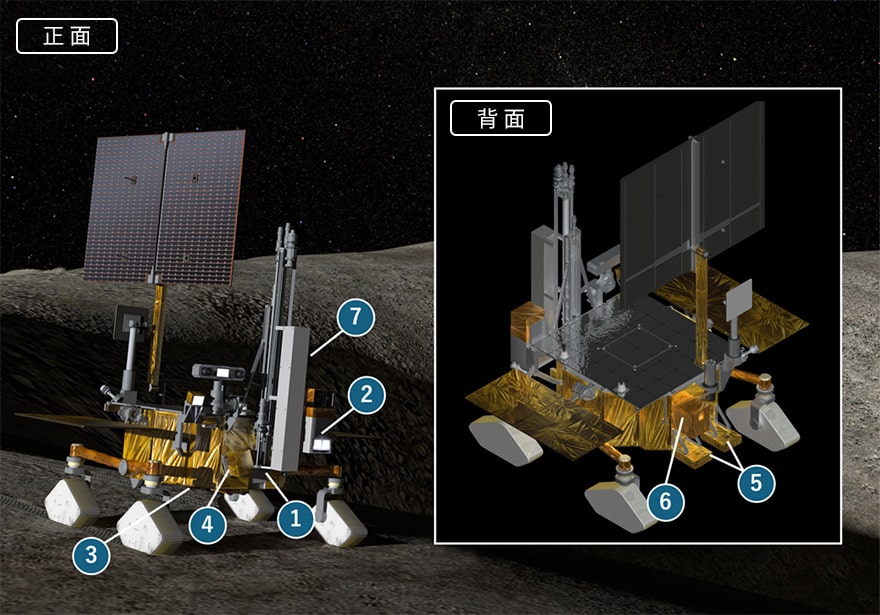
① 水資源分析計(REIWA) • 熱重量分析計(LTGA)• 質量分析計(TRITON)• 微量水分計(ADORE)• サンプル分析装置(ISAP)② 近赤外画像分光装置(ALIS)③ 中性子検出器(NS)④ 表層分圧計(EMS-L)⑤ 地中レーダー(GPR)⑥ 中間赤外画像分光装置(MIR)⑦ 誘電率・熱物性計(PRATHIMA)
LUPEXローバーシステム
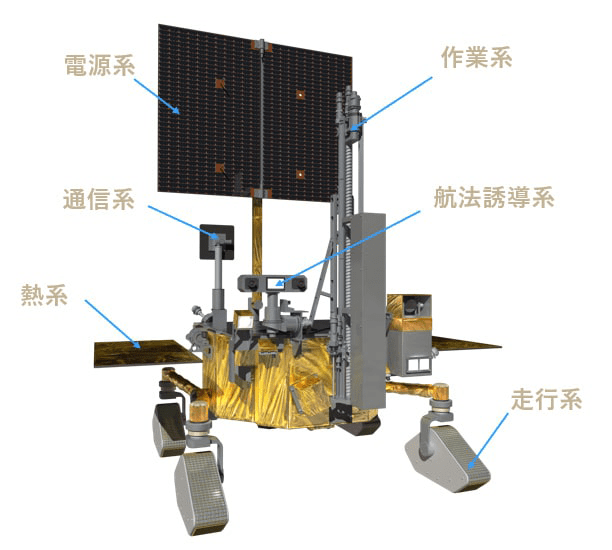
| サブシステム | 主要なコンポーネント |
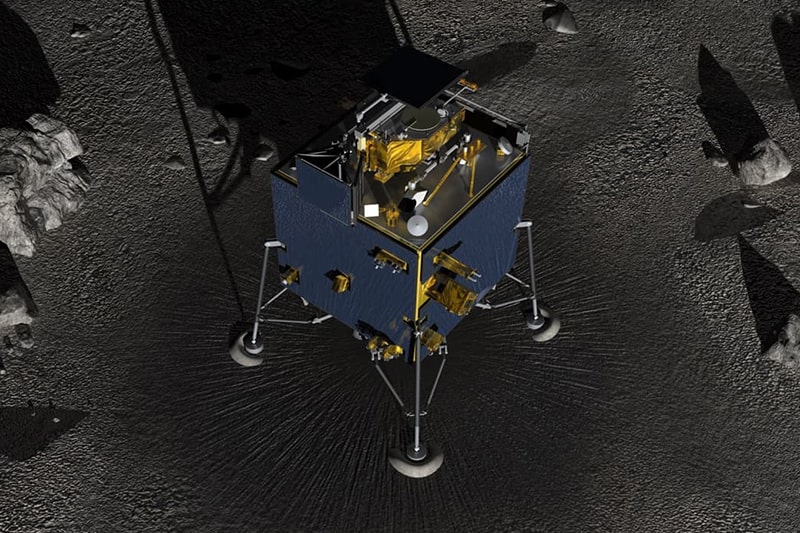
| 電源系 | フラット型展開太陽電池パネル リチウムイオンバッテリ |
| 通信系 | X帯通信 S帯通信またはWi-Fi ハイゲインアンテナ ローゲインアンテナ |
| 走行系 | 4脚クローラ 4輪独立ステアリング機構 |
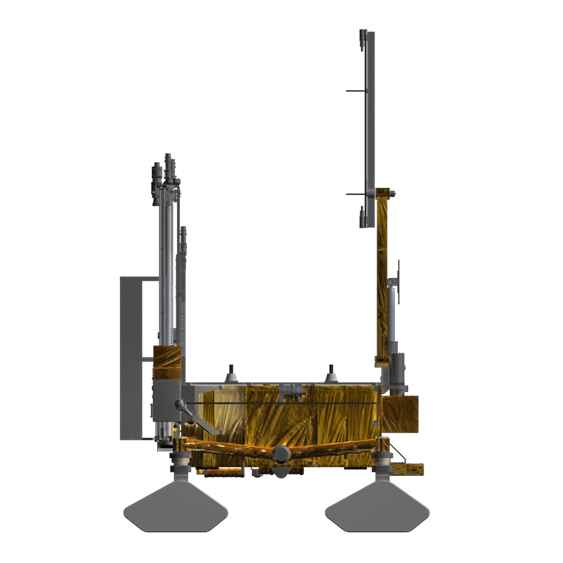
| 作業系 | 1.5mアースオーガ |
| 熱系 | ラジエータ ループヒートパイプ |
| 航法誘導系 | 航法カメラ 障害物カメラ ライト 慣性計測ユニット(IMU) スタートラッカ(STT) |
実施体制
LUPEXはインド宇宙研究機関(ISRO)との国際共同ミッションです。日本はロケットとローバーの開発・運用を担当し、インドは着陸機の開発と運用をそれぞれ担当します。また、LUPEXローバーには日本の観測機器だけでなく、インドやアメリカ、ヨーロッパの機器も搭載します。

ミッションロゴの由来
こちらのマークは、LUPEXローバーの特徴である太陽光パネル、掘削ドリル、ハイゲインアンテナをシンプルにデザインし、地中の⽔(氷)へ繋がっています。⽉探査であることを⽉齢の低い⽉を⼊れることでさりげなく取り⼊れています。
ミッション概要
| 項目 | 内容 |
| 打上げ年度 | 2028年度 |
| 打上げロケット | H3 |
| 打上げ場所 | 種子島宇宙センター |
| 打上げ質量 | 6.5トン |
| ローバー質量 | 350kg(搭載観測機器質量含む) |
| ローバーサイズ(L x W x H) | 2.0m x 1.8m x 3.3m |
| ミッション期間 | 着陸後3.5か月(最長1年) |
観測の流れ
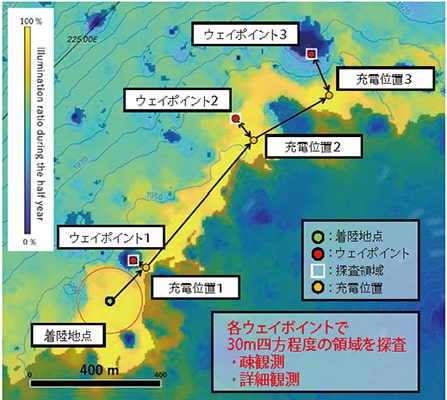
着陸地点付近で、温度・⽇照・地質が特徴的な⽬標地点(ウェイポイント)と探査領域を選定し、あらかじめ広域経路計画を設定します。ローバーは着陸地点から、経路計画に基づいて探査領域への移動、観測運⽤やバッテリ充電などを⾏います。
観測運⽤としては、各探査領域において、
- 疎観測: 探査領域内の掘削地点の決定のための基礎データを取得
- 詳細観測: 表層〜深さ約1.5mのレゴリス試料を採取し、⽔資源分析計等で更に詳細に分析
を⾏い、⽔(氷)の分布や、形態・存在量についてのデータを取得します。
プロジェクトリレートーク LUPEX
⽉極域探査機(LUPEX)プロジェクトチームのインタビュー記事「⽉極域で⽔の存在をつきとめる「LUPEX」プロジェクトとは?」は、こちら
※特に断りのない限り、画像クレジットは©JAXA