将来の有人与圧ローバー開発に
必要な月面データを取得
民間企業の月着陸ミッションを活用した月面でのデータ取得(Lunar surface data Acquisition Mission for Pressurized rover Exploration: LAMPE【呼称:ランプ】)は、有人与圧ローバーの研究開発等に必要な月面データを取得すること、及び民間企業の月探査への参入を促進することを目的としています。
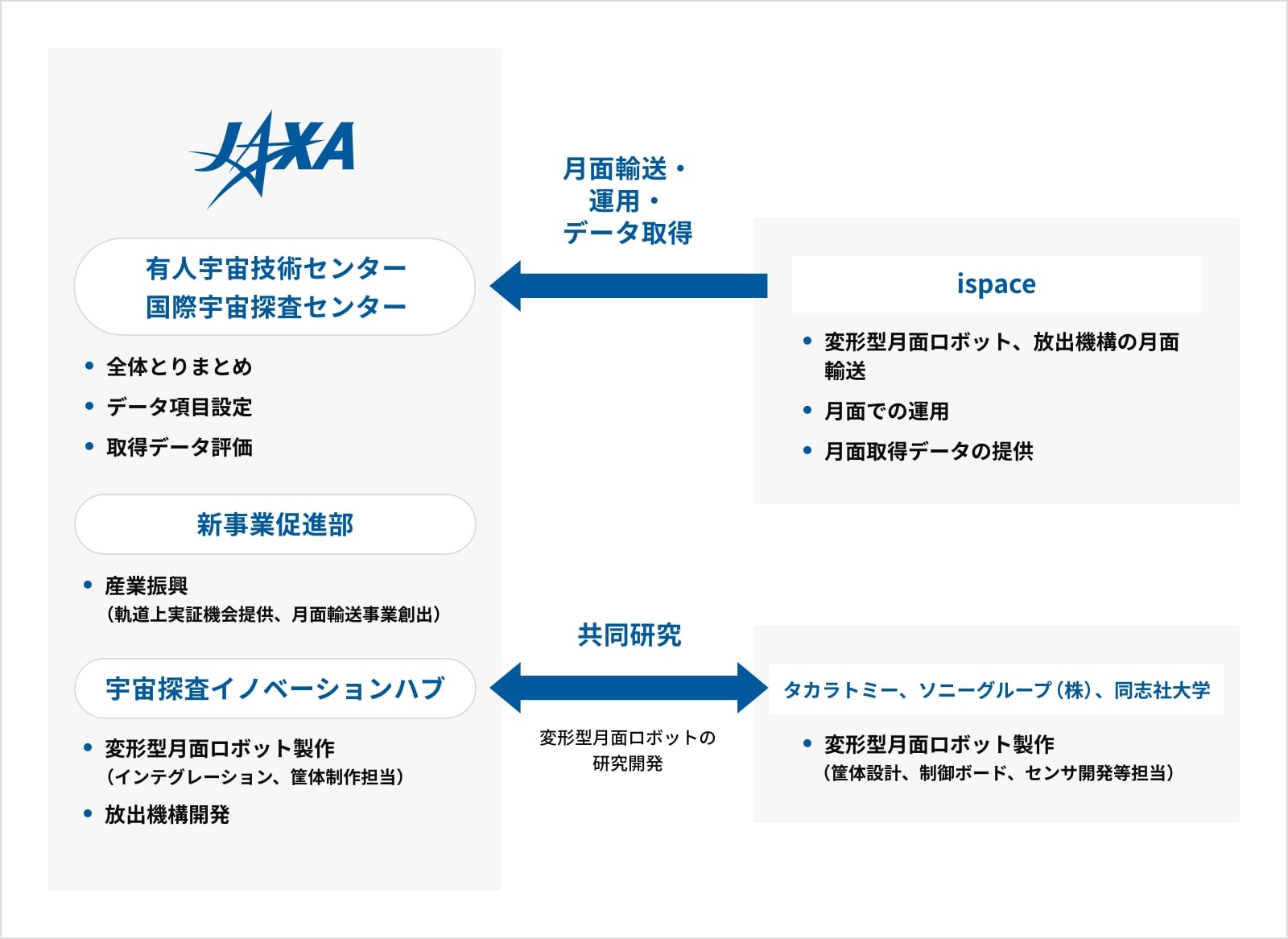
実施体制とミッションの目標
宇宙探査イノベーションハブでの共同研究(JAXA、タカラトミー、ソニーグループ、同志社大学)で研究開発した変形型月面ロボットを、民間企業の月着陸ミッションの機会を活用して、月面に放出し走行させることで、低コスト・短期間で月面でのデータ取得を行います。小型省電力の民生IoTデバイスの宇宙環境耐性の確認や月面環境に適したカメラパラメータの取得など変形型月面ロボットの宇宙実証を行い、また、民間輸送サービス事業者との連携により、宇宙実証機会や月面輸送機会の利用拡大につなげます。
ミッションロゴの由来
六角形のロゴ形状は、玩具メーカーの機構設計技術が活かされた変形型月面ロボット車輪凹凸を模しており、優れた地上技術が活躍する新しい宇宙探査時代の幕開けを象徴しています。また、月面で走行する日本最初のロボットになる可能性があることから、「夜明け、はじまり」のイメージを込めた、光を放出するデザインを採用し、ミッション名の通り、「将来の月探査ミッションに灯りをともす」という想いが込められています。
変形型月面ロボットの概要
小型・軽量・低コスト
直径約80mm、質量約250gで、非宇宙用の民生部品や玩具開発で培われた技術を活用しています。故障によるリスクは高まりますが、重要な装置を除き冗長(予備)部品を搭載しないことで、小型・軽量・低コストを実現しています。
球体から移動形態へ変形
月面到着後に走行用の形状へ変形します。これは、月着陸船搭載時の容積を小さくできるという特徴があります。
カメラを前後に搭載
頭部前方、後方に搭載されたカメラで月着陸船や周囲の状況、轍(わだち)などを撮影します。撮像した画像は、月着陸船を経由して地上に送信されます。

フライト情報
| 項目 | 内容 |
| 打上げロケット | Space X社 Falcon9 |
| 打上げ日時 | 2022年12月11日(日) 16時38分(日本時間) |
| 打上げ場所 | 米国フロリダ州ケープカナベラル宇宙軍基地 40射点 |
| 月着陸船 | ispace社 民間月面探査プログラム「HAKUTO-R」 ミッション1ランダー |
| 月着陸予定時期 | 2023年4月26日(水) 1時40分(日本時間)※ |
※下記リンクのispace社プレスリリースを参照
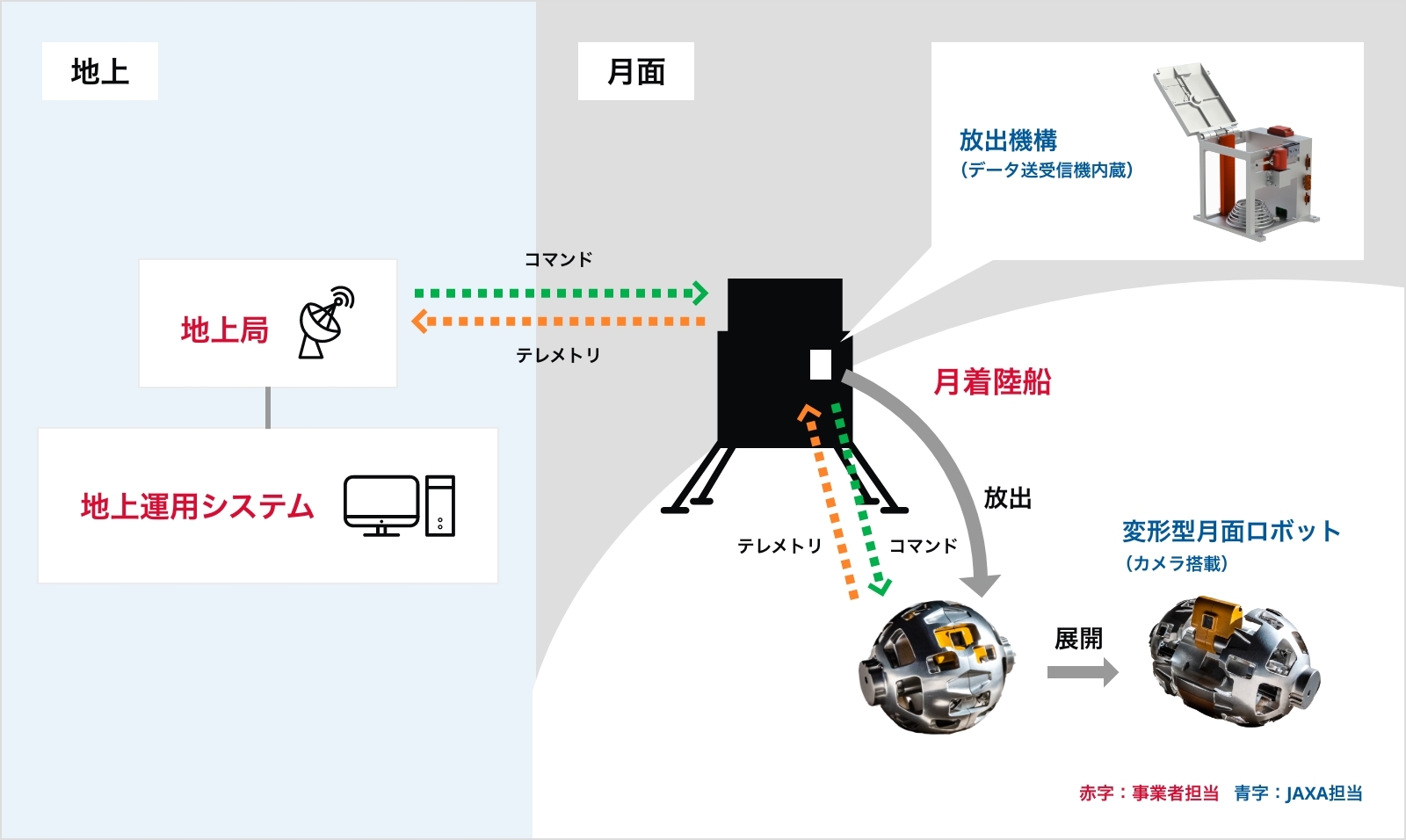
データ取得シークエンス
- 月面輸送後に月着陸船搭載カメラで撮像を開始、その後、放出機構から変形型月面ロボットを放出する。
- 月着陸船搭載カメラで撮像した画像をダウンリンクし、撮像画像から、地上側で変形型月面ロボットの移動方向・移動距離・カメラ動作を判断、月着陸船経由でコマンドを送信して変形型月面ロボットを走行させる。(放出機構にデータ送受信機搭載)
- 変形型月面ロボット搭載カメラの画像、月着陸船搭載カメラの画像、走行中のIMU(加速度、角速度センサ)データ、エンコーダ(車輪角度センサ)データを月着陸船経由でダウンリンクする。
※変形型月面ロボットは、小型のため太陽電池パネルを有しておらずバッテリで駆動します。そのため月面放出後は数時間しか動くことができません。限られた時間内にできるだけ多くのミッションを達成するため、あらゆる不具合を想定した手順書を作成、運用訓練を重ねることで、短い時間を最大限有効に活用します。
ミッションの流れ
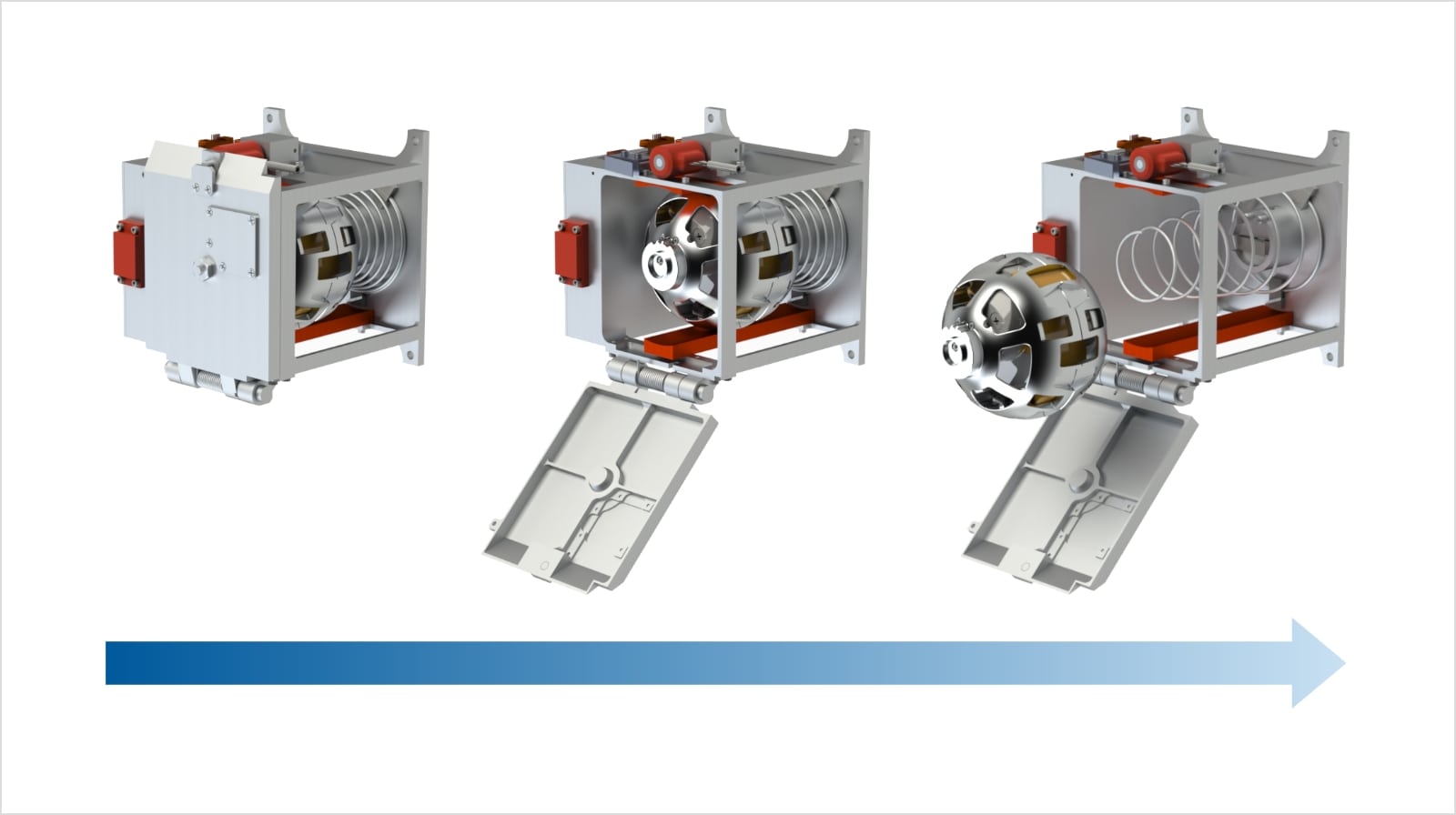
ミッション1:月面への変形型月面ロボットの放出
変形型月面ロボットは放出機構と呼ばれる箱の中に格納された状態で月着陸船に搭載されています。月に到着するまでに宇宙空間に放出されることがあってはなりませんが、到着後には確実に月面に放出する必要があります。放出機構の蓋はボルトで抑えられており、放出時にボルトを切断することで蓋が開き、ばねの力で放出されます。 放出の様子は月着陸船搭載カメラから撮像を行います。
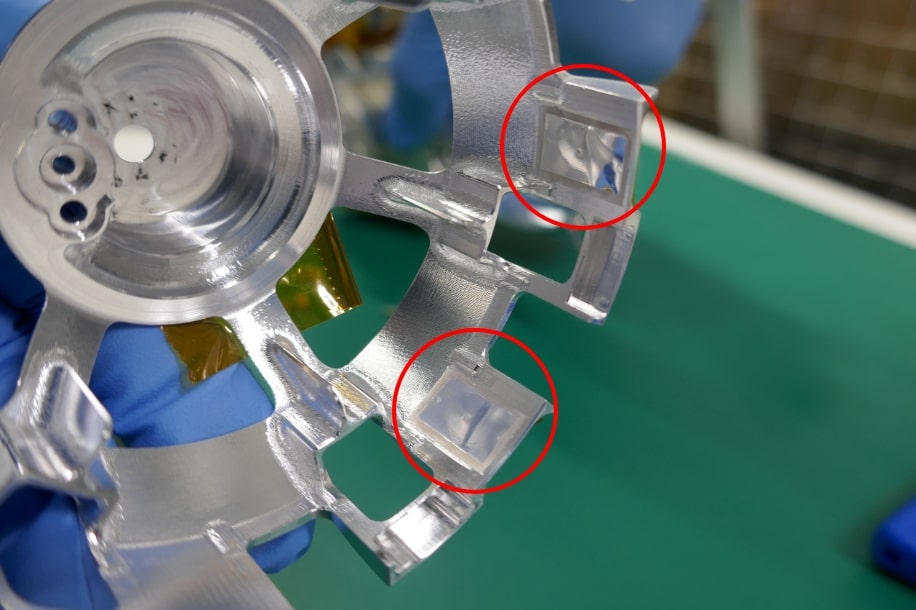
ミッション2:レゴリス付着防止コーティングの有効性を確認
レゴリスと呼ばれる月面の砂が静電気や分子間力により窓、センサ、太陽電池パネル等に付着するとローバーの性能が著しく低下する恐れがあります。変形型月面ロボットの車輪の内側にはレゴリス付着防止の表面処理が施されたフィルムが貼られており、ロボットを月面走行させた後にロボット搭載カメラにより車輪を撮影することでレゴリス付着防止コーティングの有効性を確認します。
ミッション3:画像による自己位置推定
GPSがない月面では自分の位置を推定することが困難です。位置を推定するための技術は様々ありますが、本ミッションでは変形型月面ロボット搭載カメラにより月面を撮像した画像等から、ロボットの移動量や向きを算出し、自分の位置を推定する手法について評価を行います。
放出機構
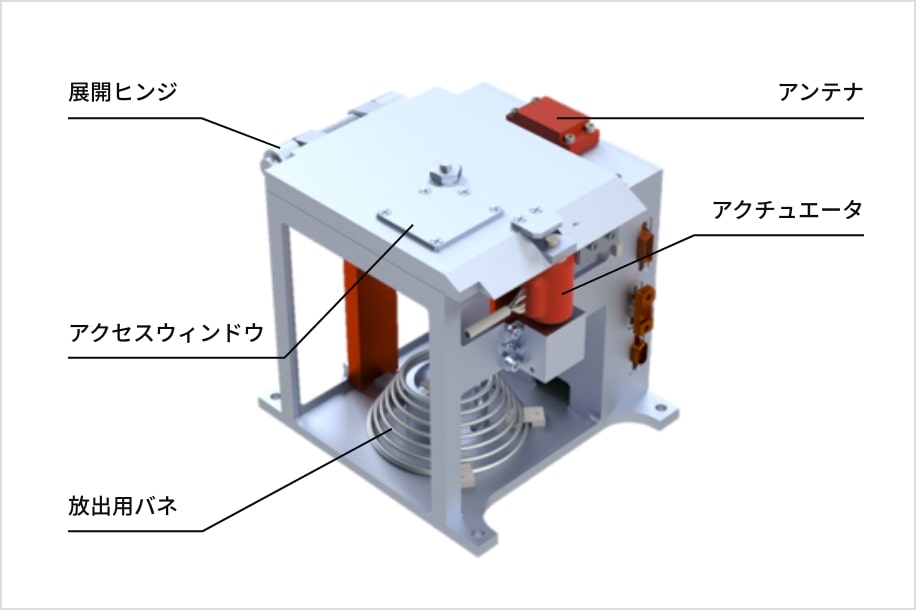
月着陸後、月面に変形型月面ロボットを放出する機構。
高さ:約120mm × 長さ:約120mm × 幅:約110mm、質量:約600g
放出機構のふたを押さえているボルトを切断するとふたが開き、ばねにより変形型月面ロボットが放出されます。
レゴリス付着防止コーティング
変形型月面ロボット筐体の一部に採用されているコーティングフィルムは、JAXA宇宙探査イノベーションハブと、株式会社ニデック(NIDEK CO., LTD.)との共同研究を通じて、防じん性能を地上で確認したものです。月面でのデータ取得を通じて、このコーティングが、月面のレゴリスに対しても有効かを評価します。

メンバー紹介
民間企業の月着陸ミッションを活用した月面でのデータ取得(LAMPE)ミッションメンバーのインタビュー記事「日本の月面探査に灯りを!変形型月面ロボットで挑むLAMPEミッション」はこちら

ミッションの状況
月着陸船との通信の回復が見込めず、本ミッションの遂行は困難となったため、変形型月面ロボットの月面への放出並びにミッションデータ取得を行うことはできませんでしたが、その開発から運用準備までの間に得られた知見を、今後の月探査に向けた研究開発に活かしてまいります。
※特に断りのない限り、画像クレジットは©JAXA