今月は基礎ロボティクス訓練、無重量体感(パラボリック)訓練をご紹介いたします。
基礎ロボティクス訓練
宇宙飛行士は国際宇宙ステーション(ISS)に滞在中、船外活動(EVA)のサポートやCygnus等補給機の把持などのために17m超の巨大なロボットアーム(Space Station Remote Manipulator System: SSRMS)を操作します。このロボットアーム操作には非常に高度な技術が求められ、宇宙飛行士はISSを訪れるまでの訓練期間でNASAやCSA(Canada Space Agency: カナダ宇宙庁)でロボットアーム操作技術を習熟させます。今回、NASA/CSAでの訓練に対する事前準備として、「そもそも、ロボットアームとは何か」「どのようにして操作するのか」「ISSではロボットアームを用いてどのようなミッションを行うのか」といった宇宙ロボティクス全般の概要を学ぶ、基礎ロボティクス訓練を筑波宇宙センターで受講しました。
二週間に渡る座学・シミュレーターを用いたロボットアーム基本操作練習、さらには難易度の高いロボットアーム操作演習を実施することで、米田・諏訪両宇宙飛行士候補者は宇宙ロボティクス運用に関する基礎能力を習得することができました。
二週間に渡る座学・シミュレーターを用いたロボットアーム基本操作練習、さらには難易度の高いロボットアーム操作演習を実施することで、米田・諏訪両宇宙飛行士候補者は宇宙ロボティクス運用に関する基礎能力を習得することができました。


講師のコメント
本訓練は座学/シミュレーターを用いた操作訓練から成る計11レッスンで構成されており、私を含む「きぼう」日本実験棟宇宙飛行士訓練インストラクターによって開発・提供されました。
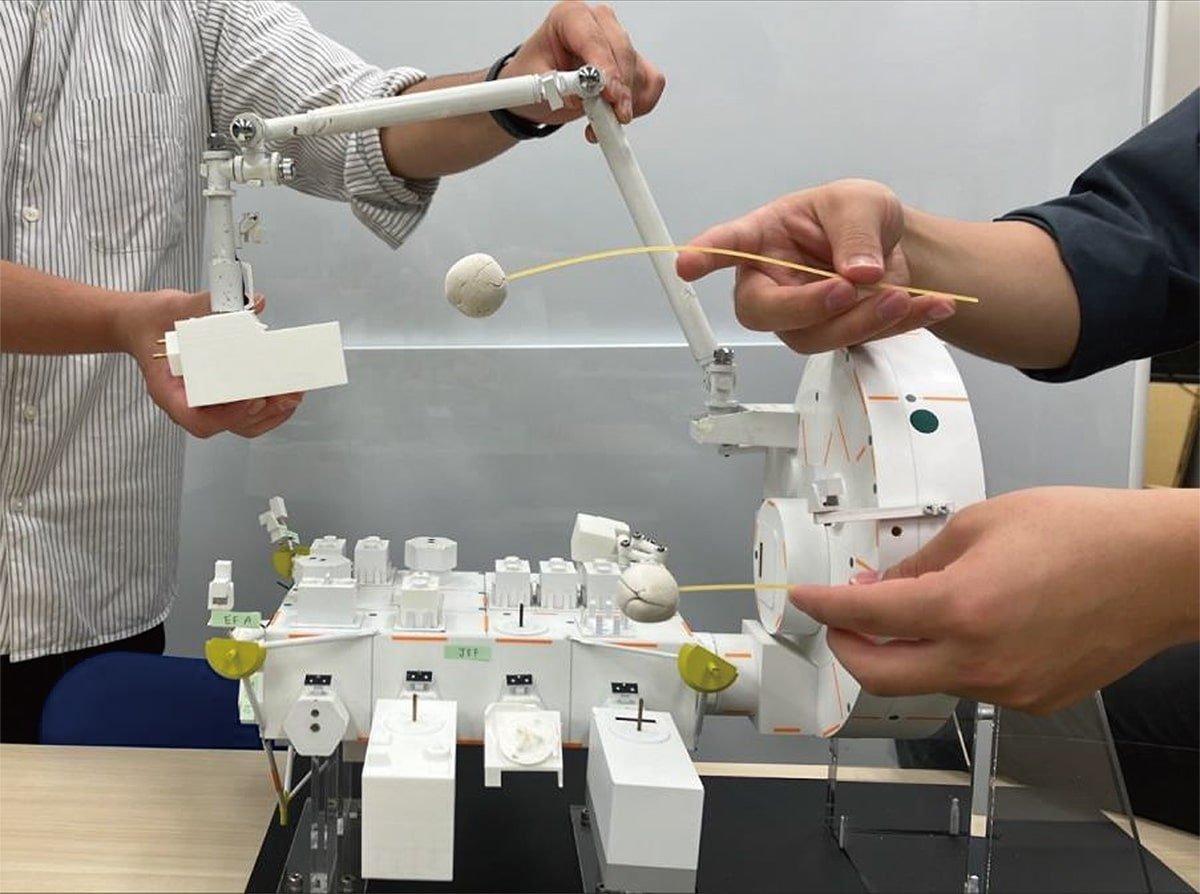
初めて宇宙ロボティクスに触れる人にとって、ロボットアーム特有の知識は全く新しい概念であり理解が難しいポイントです。その複雑な内容をどのようにしたら楽しく分かりやすく米田さん、諏訪さんにお伝えすることができるのか、レッスンにおける工夫を考えるのが本訓練開発における非常に面白いところでした(あるレッスンでは粘土とパスタを用いてロボットアームの特性を説明しましたが、訓練提供側の私も楽しみながらレッスンを実施することができました)。私は主にシミュレーターを用いたロボットアーム操作のレッスン開発/提供を担当いたしましたが、米田さん、諏訪さんお二人の理解と習熟の早さは我々の想定を遥かに超えるもので、ロボットアームの基本操作だけでなく実運用ミッションを模擬した高難度操作までもレッスン中/自習中に自主的に挑戦し、技能を習得されていたのには感銘を受けました。
お二人の次なる段階は、NASA/CSAでのSSRMS操作訓練となります。これらの訓練を通してより高度なロボットアーム操作技術を身に着け、近い将来、米田さんと諏訪さんが宇宙に行った際、まるで自分の腕のように自由自在にロボットアームを操作し大活躍されると確信しております!
初めて宇宙ロボティクスに触れる人にとって、ロボットアーム特有の知識は全く新しい概念であり理解が難しいポイントです。その複雑な内容をどのようにしたら楽しく分かりやすく米田さん、諏訪さんにお伝えすることができるのか、レッスンにおける工夫を考えるのが本訓練開発における非常に面白いところでした(あるレッスンでは粘土とパスタを用いてロボットアームの特性を説明しましたが、訓練提供側の私も楽しみながらレッスンを実施することができました)。私は主にシミュレーターを用いたロボットアーム操作のレッスン開発/提供を担当いたしましたが、米田さん、諏訪さんお二人の理解と習熟の早さは我々の想定を遥かに超えるもので、ロボットアームの基本操作だけでなく実運用ミッションを模擬した高難度操作までもレッスン中/自習中に自主的に挑戦し、技能を習得されていたのには感銘を受けました。
お二人の次なる段階は、NASA/CSAでのSSRMS操作訓練となります。これらの訓練を通してより高度なロボットアーム操作技術を身に着け、近い将来、米田さんと諏訪さんが宇宙に行った際、まるで自分の腕のように自由自在にロボットアームを操作し大活躍されると確信しております!
※特に断りのない限り、画像クレジットは©JAXA