第一回では、宇宙ステーション補給機「こうのとり」(HTV)の次世代を担う新型宇宙ステーション補給機「HTV-X」のプロジェクトチームを紹介しました。「HTV-X」は、「こうのとり」と同様、国際宇宙ステーション(ISS)のロボットアームで宇宙飛行士がキャプチャし結合されますが、これを自動でドッキングさせる技術の開発も進められています。この「自動ドッキング技術」は、将来「HTV-X」がゲートウェイ(月周回有人拠点)への物資補給を視野に入れるために不可欠な技術です。そこで、HTV-Xプロジェクトとは別に、「自動ドッキング技術実証プロジェクトチーム」が、2021年度に新たに発足しました。「 HTV-X」1号機に続く「HTV-X」2号機では、この「自動ドッキング技術」の軌道上実証を行うことが計画されています。日本初の挑戦となる自動ドッキング技術で、開発の最前線に携わる4人に、仕事のやりがいや魅力についてざっくばらんに語り合ってもらいました。
前回の新型宇宙ステーション補給機「HTV-X」についての記事はコチラ
それぞれの宇宙への想い
Q:自己紹介をおねがいします。JAXAに入社したきっかけも教えてください。
私は2003年にJAXAに入社し、衛星プロジェクトなどの仕事を経て、「こうのとり」には6号機から関わりました。7、8、9号機ではフライトディレクタを担当しました。「こうのとり」運用の終わりが見えた頃から「HTV-X」の開発計画が本格化し、私は初期の構想段階から関わってきました。
2014年に入社しました。希望していた有人宇宙技術部門に配属され、「こうのとり」5号機から関わっています。「HTV-X」では1号機の与圧モジュールの詳細設計を担当し、今は誘導制御系も担当しています。小学生の時に、たまたま学級文庫で見つけた月の石の本から興味を持ち、ぜひ実物を見てみたいと親にお願いして国立科学博物館まで見に行ったことがありました。実物を目にして、とても感動したのを覚えています。高校時代から国際協力に興味を持ち、JAXAにぜひ入社したいと思いました。
冨田さんのきっかけは初めて聞きました。新鮮ですね!
私は2019年に入社して、今4年目になります。自動ドッキング技術実証プロジェクトでは誘導制御系ソフトウェアや、ドッキングモニタシステムの開発を担当しています。
みんな子どもの頃から宇宙に関心があったんですね。この流れを断ち切ってしまうのですが、私は大学の卒業論文を書くために、選んだ研究室がたまたま相模原の宇宙研(宇宙科学研究所)だったんです。宇宙太陽光発電衛星やマイクロ波の無線電力伝送などの研究をしました。
確かに、嶋根さんが最初管制室にいらっしゃっていたのを覚えています!
実は入社して最初の年に地上管制員として打ち上げたのが、「こうのとり」初号機を運ぶHⅡ-Bロケットだったので、実は関わりは長いかもしれません。
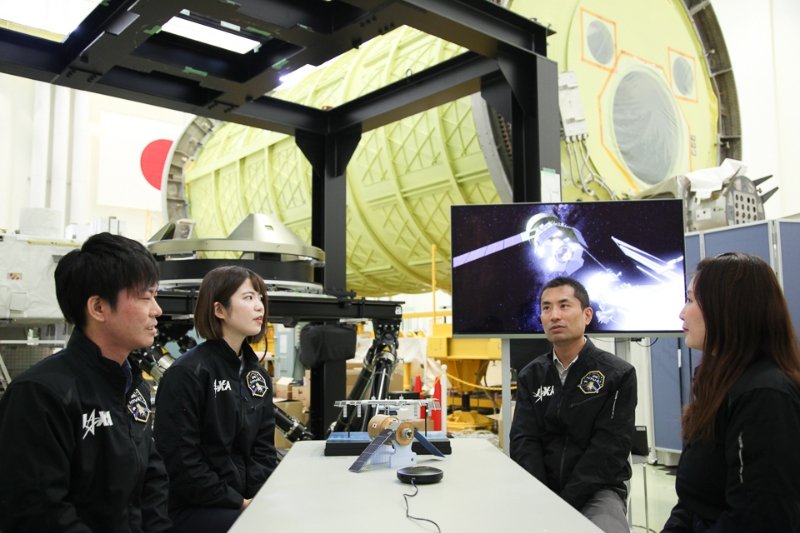
自動ドッキング技術について語る(左から)冨田さん、蜂谷さん、長浜さん、嶋根さん
日本が未だ到達したことのない、0~10mを埋める技術
Q:自動ドッキング技術実証プロジェクトとは、どのようなものになりますか。
これまでの「こうのとり」は、ISSに常駐する宇宙飛行士がロボットアームを操作し、「こうのとり」をキャプチャしてISSに結合していました。将来のゲートウェイ(月周回有人拠点)への物資輸送を視野に入れると、ゲートウェイが無人の状態であってもドッキングできる「自動ドッキング技術」が必須となります。 残念ながら日本はまだ有人ミッションに対応した自動ドッキング技術を獲得していないため、「HTV-X」2号機で技術実証を行います。「こうのとり」や「HTV-X」ではISSに約10mの距離まで近づき、宇宙飛行士が確認しながらロボットアームを操作してキャプチャすることで安全な運用を実現しました。しかし、自動ドッキングでは「HTV-X」とISSとの最後の10~0mの距離を宇宙飛行士に頼らずに自動的に制御し、安全にドッキングさせる技術が必要となります。一瞬のミスや不具合がISSへの衝突につながる可能性があり、非常に難しい技術です。
その0~10mの距離は、日本にとって前人未踏の領域ですよね。
自動ドッキング技術実証プロジェクトについて語る長浜さん
バネのような構造で、ソフトに受け止める
Q:自動ドッキングを実現するためには、どのような技術が必要ですか?
まず誘導制御系システムで「HTV-X」とISSの相対的な位置・速度を合わせこんだ後、フリードリフト状態で、「HTV-X」に搭載した自動ドッキング機構をISSのドッキングポートに優しく接触させます。次に、自動ドッキング機構を使って接触時の衝撃、最後に残った位置や速度のズレを吸収してHTV-XとISSを安全に結合させることでドッキングが完了します。「HTV-X」をドッキングに適したゾーンにゆっくりと接近させて優しくコンタクトさせる誘導制御技術と、最後に残ったズレや衝撃を吸収して安全にドッキングさせる自動ドッキング機構の技術、大きく2つの技術が必要です。その自動ドッキング機構の開発を長浜さんが、誘導制御系の開発を冨田さんと私が担当しています。
「HTV-X」の誘導制御系システムでISSのドッキングポートまで誘導するのですが、最終的にドッキング機構が接触する時にはどうしてもcm単位のズレはありますし、接触した時の衝撃を完全にゼロすることは出来ません。そこで、自動ドッキング機構はその最後の衝撃やずれを吸収するためのメカニズムを持っています。まるで自動ドッキング機構がキャッチャーミットのように優しくISSと「HTV-X」を受け止める姿を想像してもらえればと思います。
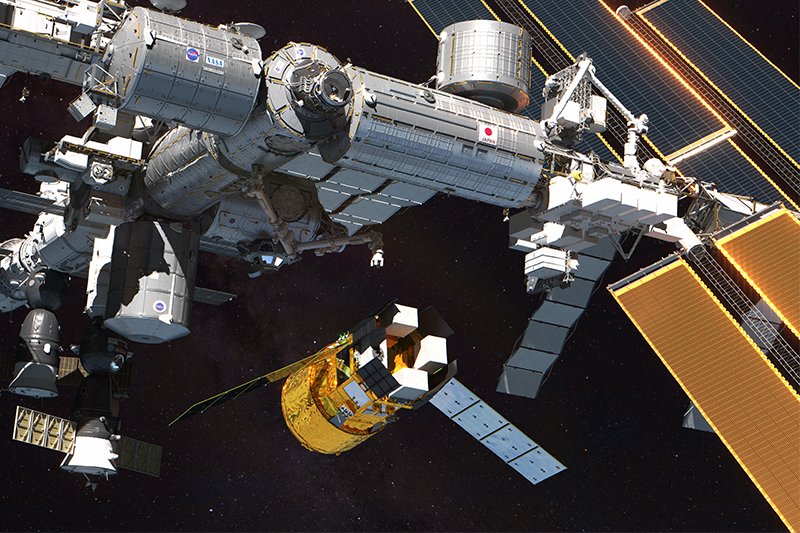
ISSのロボットアーム(SSRMS)でキャプチャされる新型宇宙ステーション補給機(HTV-X)(CG)
友人に自分の仕事を説明する時、車で言うところの自動駐車のようなことを宇宙船で行うと伝えることがあります。でも自動駐車であれば地面は静止していますが、ISSは姿勢制御をしながら、宇宙空間でゆらゆらと動いているところが非常に難しいところです。
「HTV-X」とISSはお互いに静止せずに動いている中で、お互いの姿勢を合わせる必要があります。そのためターゲットマーカーと相対航法センサを使い、レーザーを当てて返ってくる光で位置や速度を判断しながらお互いの姿勢を合わせていきます。
一歩間違えれば衝突につながりかねないので、様々な不具合を想定した場合でも安全性を確保した設計にする必要があります。有人ミッションということもあり、安全審査が厳しい点も、特に難しいところです。
自動ドッキング技術について語る蜂谷さん
私は「WLD(ワイルド)*」という「HTV-X」が自動ドッキングしている状況をISS船内にいる宇宙飛行士がモニタするためのシステムを、蜂谷さんと一緒に担当しています。最初は「ワイルドの嶋根です」と名乗るのがとても恥ずかしかったのですが、最近は、このネーミングをとても気に入っているんです。ワイルドはWi-Fiの通信規格を使い、「HTV-X」のドッキング機構の内側に搭載されているカメラで撮影する動画をリアルタイムでISS船内へストリーミング配信する機器です。このシステムを使ってISSの宇宙飛行士は、近づいてくる「HTV-X」の位置や姿勢を目でも確かめることができます。
*WLD(Wireless LAN for Docking):自動ドッキングの様子をHTV-Xのカメラで撮影し、ISS船内にWi-Fiで伝送して、クルーが映像でモニタ出来るシステム。「こうのとり(HTV)」9号機では、WLD(Wireless LAN Demonstration)ミッションとして、宇宙機同士の無線LANでの伝送を世界で初めて成功。自動ドッキングでもこの成果が活用される。
WLD(ワイルド)について語る嶋根さん
基本的には自動でドッキングするのですが、もしもの事態が起きたときには宇宙飛行士が対処できるようにしています。
ワイルドは「HTV-X」がISSのドッキングポートと結合する部分の中央に位置しているので、ISSに接近する際は、「HTV-X」のど真ん中の目線の映像が見られるはずです。
Q:「HTV-X」2号機は、具体的にどのようなミッションを行いますか。
「HTV-X」2号機がISSに到着したら、まずは「こうのとり」や「HTV-X」1号機と同じように宇宙飛行士が操作するロボットアームでキャプチャされISSと結合し、ISS係留中に輸送物資が取り出され、ISSに物資を補給します。「HTV-X」1号機では、この物資輸送ミッションが完了したあとは、ロボットアームによりISSから離れ、複数の技術実証ミッションを実施した後、大気圏へ再突入となります。 「HTV-X」2号機では、物資輸送ミッションを完了させたあとに、自動ドッキング実証ミッションのためにもう一度ISSに戻ってくる運用を行います。一度ISSから離れたあと、ISS の周りをひとまわり(フライアラウンド)して、ISSの自動ドッキング用の別のドッキングポートに自動ドッキングを行うのです。自動ドッキング後の離脱運用についても、ロボットアームを使わずに自動ドッキング機構によりアンドッキングを行い、離脱フェーズの技術を実証します。「HTV-X」2号機では、ロボットアームのキャプチャによる物資輸送ミッションと、自動ドッキング技術実証ミッション、その両方を行うことで、効率的な技術実証を可能としています。
「HTV-X」2号機のミッションについて語る長浜さん
一瞬のドッキングを成功させるための試練
Q:仕事をする中で難しいなというところや、やりがいを感じるところはどのようなところですか。
大変といえば、やはり安全審査を乗り越えるところですよね。
安全性を担保するために、非常に多くの設計要求があります。さらに、ある機器が一つ壊れても安全が確保されているか?またさらにもう一つ壊れた場合はどうなるか?という、あらゆるパターンの不具合の組み合わせを何通りも考慮した設計にする必要があります。ある一つのリスクに対処したら、今度は新たに別の対処が必要になる、ということは日常茶飯事で、課題が後から後から出てくるようなつらさがありますね。
でも「HTV-X」の自動ドッキング技術は、NASAとゼロベースで作り上げていくというところが肝でもあり、おもしろいところですよね。我々が日本のドッキング技術の新しいスタンダードを作っているのだ、というやりがいも感じています。
実際に ISS に自動ドッキングするのは一瞬の出来事になるはずですが、それを1センチメートル単位で日々考えていますよね。
そのドッキングするたった一瞬を、今何年間もかけて作り上げているという。
私は皆さんとNASAを含めた対外的な審査会をいくつか経験させてもらって、国際的な空気感がすごくいいなと。審査会では NASA のメンバーの専門的な視点や知識が勉強になりますし、交流を通して「あの人はこういう性格で、こういうお菓子が好きな人なんだ」など、人となりが見えてくるのもいいですよね。気軽なおしゃべりをする中で、これまでのNASAが経験してきた知見を聞くこともできて、刺激になります。
審査会は大変な面もありますが、いつもNASAはとても前向きですよね。日本が自動ドッキング技術を獲得することで、生まれる将来の国際協力を見据えていて、良い関係を築こうとしてくれているのが分かります。
自動ドッキング技術について語る冨田さん
Q:チームの意思疎通で工夫していることはありますか?
最近は「合宿」がキーワードです。JAXAのメンバーだけではなく、お世話になっているメーカー関係者とも、実際にお会いして議論する機会を大事にしています。
遠方のメーカー関係者の所へ出張に行き、少人数で膝を突き合わせながら合宿のように技術調整をしているんです。コロナ禍でしばらく難しかったのですが、約2年ぶりにホワイトボードを使って顔を合わせて議論できるようになってきました。顔を合わせて議論することで、本当に仕事がはかどります。
JAXAだけではなくメーカー関係者がいてくださってこそ成り立つ仕事なので、関係者全員で一体感を持ちながら仕事ができるのは、やりがいにつながります。
乗り越えるべき鍵となる技術
Q:このミッションが達成された後に、どう成長していたいか教えてください。
関わってきたプロジェクトは期間の長いものが多くて、これまでは成功まで見届けたことがありませんでした。でも、今度こそミッション完了まで見届けたいです。運用管制室から「HTV-X」2号機を見て、開発者の一人として感動的な瞬間を味わいたいです。
私も「こうのとり」の運用では、まだ自分が開発したという実感があまりなかったんです。でも今は、「HTV-X」1号機や2号機のミッションを運用することをひたすら夢見て開発しているので、そこはぜひ見届けたいです。
私は入社してからずっと宇宙船の運用や開発を担当してきましたが、その目指す先には日本から有人宇宙船で人が飛び立つ未来があると思っています。自動ドッキング技術はそのための大事な機能の一つで、乗り越えるべき鍵になる技術だと思います。ミッション完了の一瞬を、とても楽しみにしています。将来的には、有人宇宙飛行の大事な技術を自分が開発したんだと、いつか見届ける日が来たら幸せだなと思っています。
自動ドッキング技術実証は、これからの新しい宇宙船の基幹部分になる非常に重要な技術を実証するプロジェクトです。そんな、ゲートウェイ(月周回有人拠点)や有人宇宙船への発展に欠かせない技術実証をぜひ成功させたいです。個人的には、これまで宇宙飛行士候補者選抜試験に何度もチャレンジしてきたこともあり、宇宙飛行士が乗る宇宙船を安全で乗り心地良いものにしたいという気持ちが強くあります。いつか自分が関わった宇宙船に乗ることができたら最高ですよね。
Q:次回のリレートークは、ゲートウェイ(月周回有人拠点)プロジェクトチームにお願いする予定です。メッセージをお願いできますか。
「HTV-X」でゲートウェイに物資補給することは、日本の貢献として必ず重要になると思います。自動ドッキング技術で、しっかりと物資補給するので待っていてくださいね!
長浜 謙太(ながはま けんた)
有人宇宙技術部門 自動ドッキング技術実証プロジェクトチーム 主任研究開発員
経歴
2003年にJAXA(当時:NASDA)に入社。宇宙機試験設備の保守・運用・試験技術の研究、衛星プロジェクトを経て、2015年・こうのとり6号機よりHTV技術センターに所属。熱系、構造・機構系を担当するとともに、こうのとり7,8,9号機ではこうのとりフライトディレクタを担当。こうのとり8号機ではリードフライトディレクタを務めた。
趣味
マラソン、家庭菜園、料理、献血
座右の銘
天は自ら助くる者を助く、人間万事塞翁が馬
嶋根 愛理(しまね えり)
有人宇宙技術部門 自動ドッキング技術実証プロジェクトチーム 研究開発員
経歴
2009年にJAXAに入社。種子島宇宙センターにて射場管制官を担当した後、筑波宇宙センター輸送部門にてロケットアビオ系機器開発担当。2020年より有人部門にて、自動ドッキング技術実証プロジェクトチームにて機器開発やプロジェクト取りまとめ業務に従事している。
趣味
カラオケ、リゾート旅行
座右の銘
ゴーイングマイイェーイ♪
冨田 悠貴(とみた ゆうき)
有人宇宙技術部門 新型宇宙ステーション補給機 プロジェクトチーム
経歴
2014年入社。宇宙ステーション補給機こうのとり5号機から最終号機まで与圧部・カーゴインテグレーションの維持設計・運用主担当としてミッション連続成功に貢献するとともに、小型回収カプセルやHTV-Xの開発にも従事。現在は自動ドッキング技術実証ミッション開発やHTV-X初号機打上げ準備において、主に誘導制御、システム設計、モデルベースシステムズエンジニアリングに注力している。
趣味
旅行、ラーメン、RPG
座右の銘
打たぬ鐘はならぬ
蜂谷 友理(はちや ゆり)
有人宇宙技術部門 自動ドッキング技術実証プロジェクトチーム 研究開発員
経歴
2019年入社。2020 年まで「こうのとり」の運用管制員(誘導制御系)および実証ミッション開発担当を務めたのち、現在はHTV-X ・自動ドッキング技術の開発に従事。主に誘導制御系ソフトウェア、ドッキングモニタシステム、システムインテグレーションを担当し、このほか、再突入回収技術の研究開発や将来ミッション検討にも携わっている。
趣味
美味しいもの探索、アクション映画・連ドラ観賞、キックボクシング、ライブ参戦。
座右の銘
汝自身を知れ