宇宙での実験をもっと身近に。日本で初めての有人宇宙施設。
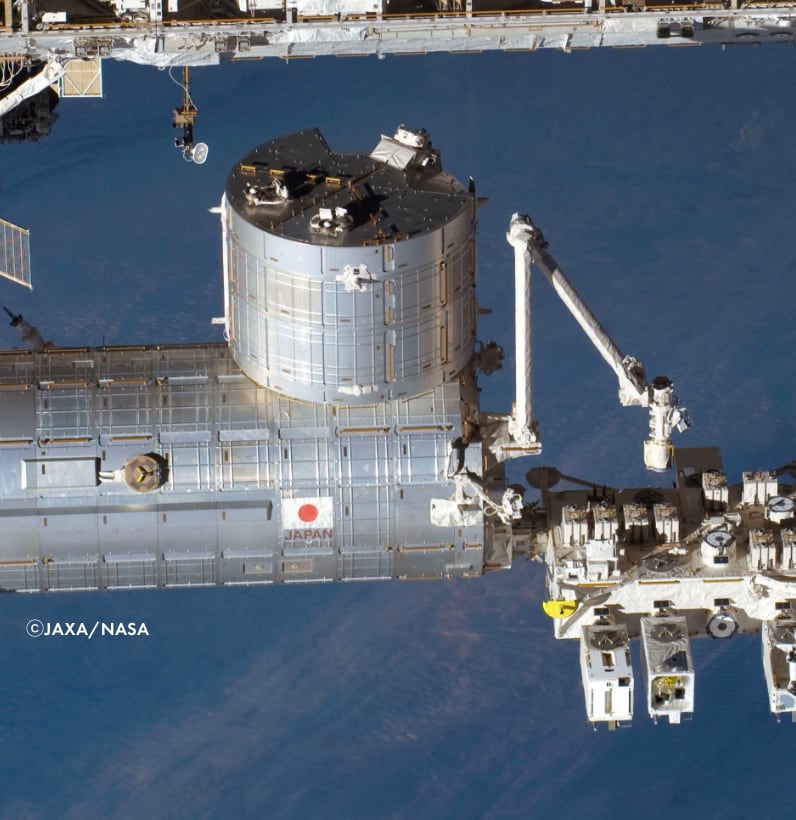
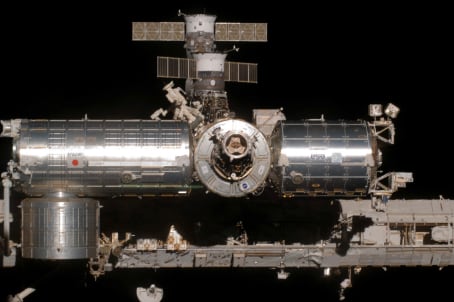
「きぼう」日本実験棟は、日本が開発を担当した実験モジュールです。宇宙飛行士が長期間活動できる、日本が誇る有人施設で、宇宙環境を利用したさまざまな実験や観測が行われています。今後の国際宇宙探査に向け必要な技術実証なども進めています。
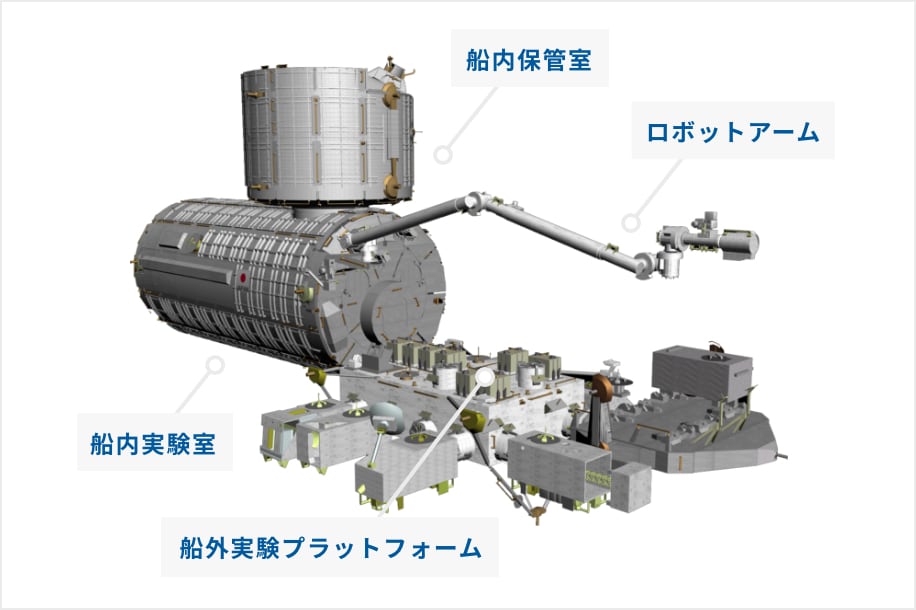
そこは「きぼう」の中心、船内実験室

「きぼう」全体の心臓部とも言える場所が、船内実験室です。宇宙飛行士が滞在して、主に微小重力環境を利用した実験を行います。室内は、地上とほぼ同じ空気組成、1気圧が保たれており、温度や湿度も、宇宙飛行士が活動しやすい環境に常にコントロールされています。そのため、宇宙飛行士は普段着で作業することができます。
JAXAデジタルアーカイブス


システムラックと実験ラック

船内実験室の内部は、実験装置やシステム機器を搭載するための「ラック」で囲まれています。ラックには、「きぼう」の運用を維持するために必要な電力、通信、空調、熱制御を確保するための機器類を搭載した「きぼう」の運用を制御・管理するシステム類を搭載した「システムラック」のほか、実験装置を搭載した「実験ラック」、実験試料などを収納する保管庫としての役割を持つ「保管ラック」などがあり、最大で23個まで設置できます。
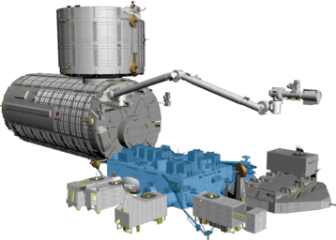
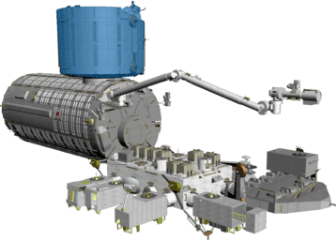
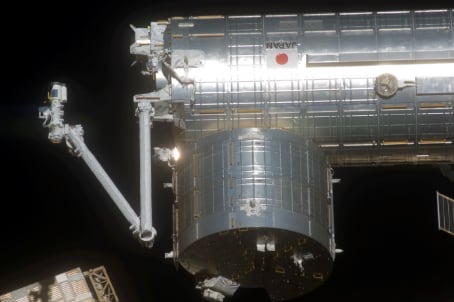
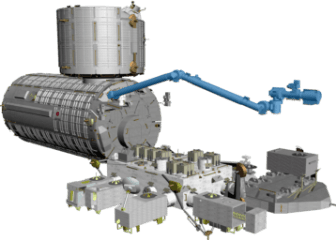
使い道は星の数、船外実験プラットフォーム
船外実験プラットフォームは、宇宙での実験の大きな特徴である微小重力、高真空などの宇宙曝露環境を利用して、科学観測、地球観測、通信、理工学実験および材料実験などを実施できる多目的実験スペース。
船外実験プラットフォームには装置を取り付ける場所が全部で12箇所あり、そこに船外実験装置を取り付けられます。また、装置を交換することで、いろいろな実験を行えます。
JAXAデジタルアーカイブス
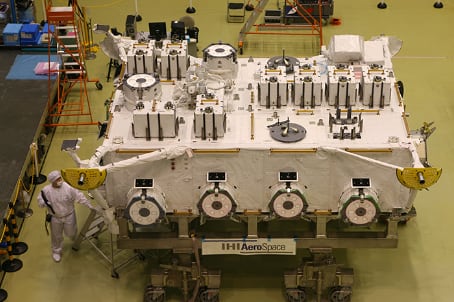

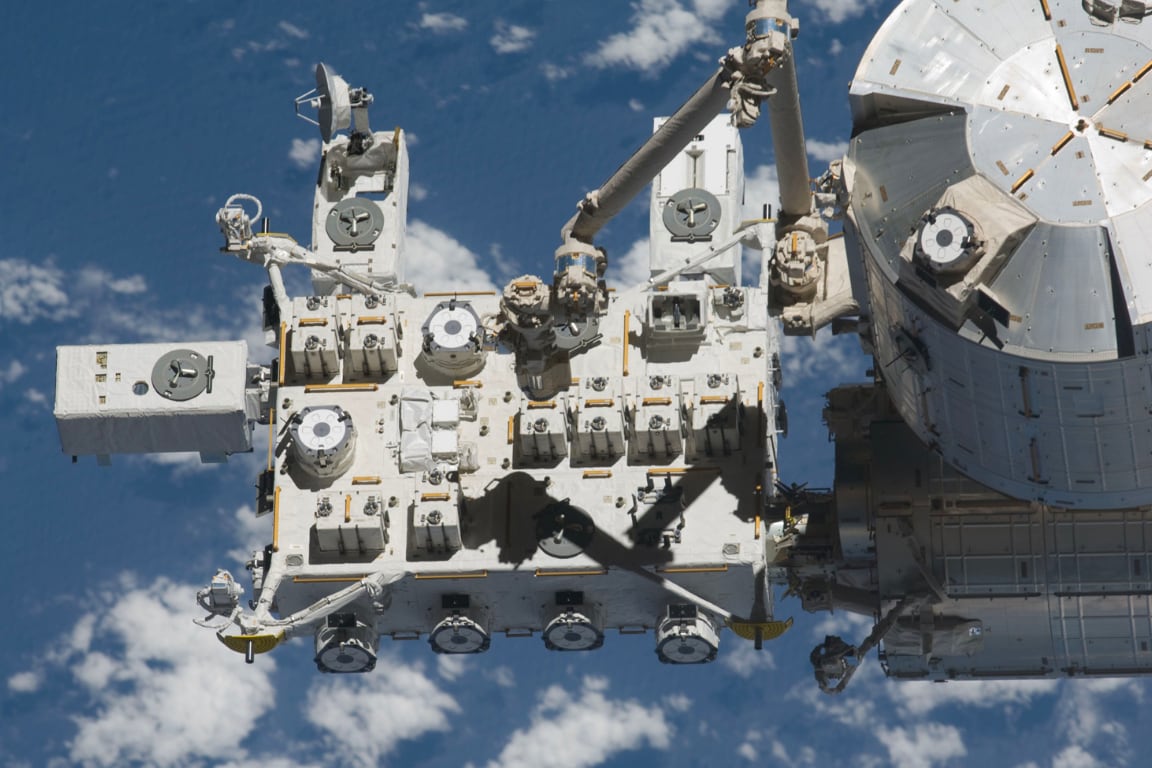
船外実験プラットフォームの主な構成要素
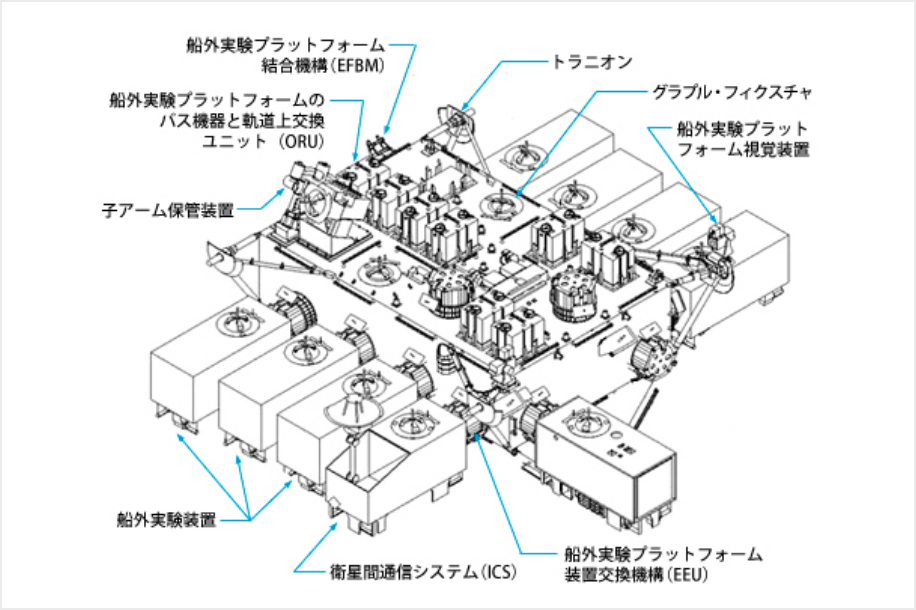
ORU: 軌道上交換ユニット
電力系、通信・制御系、熱制御系など、船外実験プラットフォームを運用するための機器は故障時などに交換が可能
EFBM:船外実験プラットフォーム結合機構
船外実験プラットフォームと船内実験室を結合する機構。EFBMが結合すると同時に電力系、通信制御系、熱制御系が接続され、船内実験室から船外実験プラットフォームへの電力供給や各種データのやり取りなどが可能
トラニオン
スペースシャトルのペイロードベイ(貨物室)に、船外実験プラットフォームを搭載する際の固定部です。
グラプル・フィクスチャ(把持部)
ロボットアームが把持する場所
船外実験プラットフォーム視覚装置
TVカメラと照明。視覚装置からの映像を見ながらロボットアームを操作し、実験装置やORUの交換を行います。
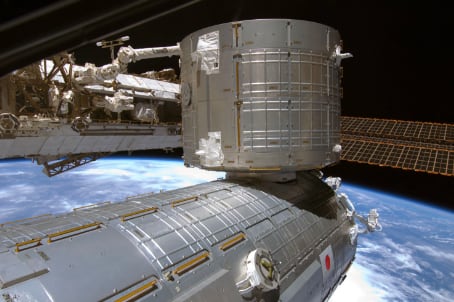
収納・整理整頓、船内保管室

実験装置や試料、消耗品などを保管する倉庫の役割を持つスペースで、専用の保管室を持っているのはISSの実験モジュールの中でも「きぼう」だけ。室内は船内実験室と同じ1気圧に保たれており、宇宙飛行士が船内実験室と自由に行き来できます。
JAXAデジタルアーカイブス

船内保管室の役割

船内保管室は、打上げ時には実験ラックなどを運ぶためのコンテナとして使用され、内部には8つのラックを搭載できます。「きぼう」第1便(1J/Aミッション)として、「きぼう」のシステムラックや実験ラックを搭載して打ち上げられ、ISSに運びました。いわば、日本初の有人宇宙機です。軌道上では主に保管庫として使用され、システム機器・実験装置などのメンテナンスに必要なツール、実験試料、万が一の機器の故障時に備えて予備品などが保管されています。
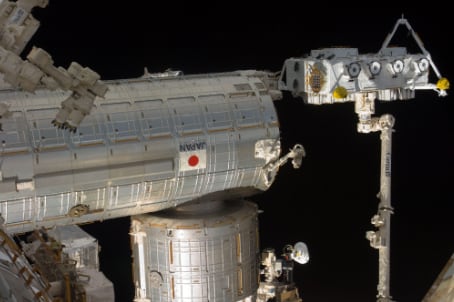
力持ちで器用な、宇宙専用ロボットアーム
船外実験プラットフォームの実験で、実験装置の交換など人間の代わりに作業を行う「腕」、 「きぼう」ロボットアーム(JEMRMS)。「親アーム」と、その先端に取り付けられる「子アーム」は、それぞれ6個の関節を持ち、地上の管制センターからコマンドを送って遠隔操作されています。

JAXAデジタルアーカイブス

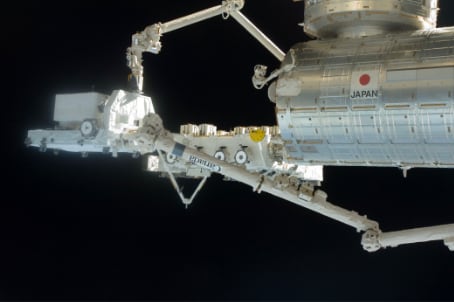

ロボットアームの操作

当初、このロボットアームは「きぼう」内にいる宇宙飛行士が、ジョイスティックのような装置(ロボットアーム操作卓)を使って宇宙の現場で動かしていました。しかし、今は宇宙飛行士の負担を少しでも減らして人間にしかできない仕事に徹してもらうため、地上の管制センターから遠隔操作を行なっています。
ロボットアーム操作卓は2008年3月に1J/Aミッションで、親アームは、2008年6月に1Jミッションで、子アームは、2009年9月に宇宙ステーション補給機「こうのとり」1号機(HTV技術実証機)で打ち上げられました。
※特に断りのない限り、画像クレジットは©JAXA