でくすたー
デクスター
Dextre
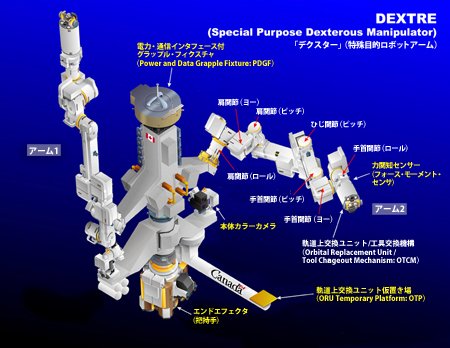
「デクスター」(特殊目的ロボットアーム)は、国際宇宙ステーション(ISS)のロボットアーム(Space Station Remote Manipulator System: SSRMS)の技術を応用して、カナダ宇宙庁(CSA)が設計・開発したロボットアームです。
デクスターは、人間の上半身のような形をしており、SSRMSの先端に取り付けて使用されます。デクスターにより、これまでクルーが船外活動で行っていたような複雑な作業を、ロボット操作で行うことができるようになりました。

デクスターは、2008年3月のISS組立フライト1J/A(STS-123ミッション)で打ち上げられ、軌道上で船外活動により組み立てられました。使用されない時は、「デスティニー」(米国実験棟)の外壁に設置され、保管されます。
デクスターの主要諸元
| 項目 | 値 |
| 重量 | 1,688kg |
| 長さ | 3.66m(本体) 3.51m(本体肩部からOTCMの先端まで) |
| 取扱い重量 | OTP=最大600kg OTCM=最大600kg エンドエフェクタ(把持手)=最大1,000kg |
関連リンク
関連カテゴリ
※特に断りのない限り、画像クレジットは©JAXA