じぇーいーえむあーるえむえす(「きぼう」ろぼっとあーむ)
JEMRMS(「きぼう」ロボットアーム)
JEM Remote Manipulator System: JEMRMS
「きぼう」日本実験棟のロボットアームは、「きぼう」での実験、保全作業支援に使用する、宇宙での実用ロボットで、日本では、ロボットアーム飛行実証試験(Manipulator Flight Demonstration: MFD)、技術試験衛星Ⅶ型につぎ、3番目の宇宙用遠隔操作型ロボットアームシステムとなります。
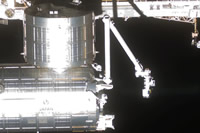
「きぼう」ロボットアームは、船外実験プラットフォームに設置する実験装置の設置や取り外し、搭載機器の交換作業(故障時のみ)、「きぼう」エアロックを使った船外への実験装置の搬出や船内への回収、ExHAMなどの実験の支援、または保守・保全作業時の支援(TVカメラと照明を使った点検など)に使われています。特に近年は、小型衛星放出機構J-SSODや、米国の小型衛星放出機構を使って超小型衛星の放出を行うために使われることが増えています。
ロボットアームは、主に「親アーム」、その先端に取り付けられる「子アーム」と、「ロボットアーム操作卓」から構成されます。親アーム、子アームは共に6 つの関節を持っていて、人間の腕と同じような動作が可能です。本体の親アームは、船外実験装置など大型機器の交換に使用し、先端の子アームは、細かい作業を行うときに使用します。
ロボットアーム操作卓は、2008年3月に1J/A(STS-123)ミッションで、親アームは、2008年6月に1J(STS-124)ミッションで打ち上げられました。
「きぼう」ロボットアームの仕様
| 項目 | 親アーム | 子アーム |
| 型式 | 親子式6自由度アーム | |
| 自由度 | 6 | 6 |
| 長さ | 10m | 2.2m |
| 質量 | 780kg | 190kg |
| 取扱量 | 最大7,000kg | 最大300kg |
| 位置決め精度 | 並進 ±50mm | 並進 ±10mm |
| 最並進 ±10mm | 回転 ±1度 | |
| 先端速度 | 60mm/s(対象物:600kg以下) | 50mm/s(対象物:80kg以下) |
| 30mm/s(対象物:3,000kg以下) | 25mm/s(対象物:300kg以下) | |
| 20mm/s(対象物:7,000kg以下) | - | |
| 最大先端力 | 30N以上 | 30N以上 |
| 寿命 | 10年以上 | |
関連リンク
関連カテゴリ
※特に断りのない限り、画像クレジットは©JAXA