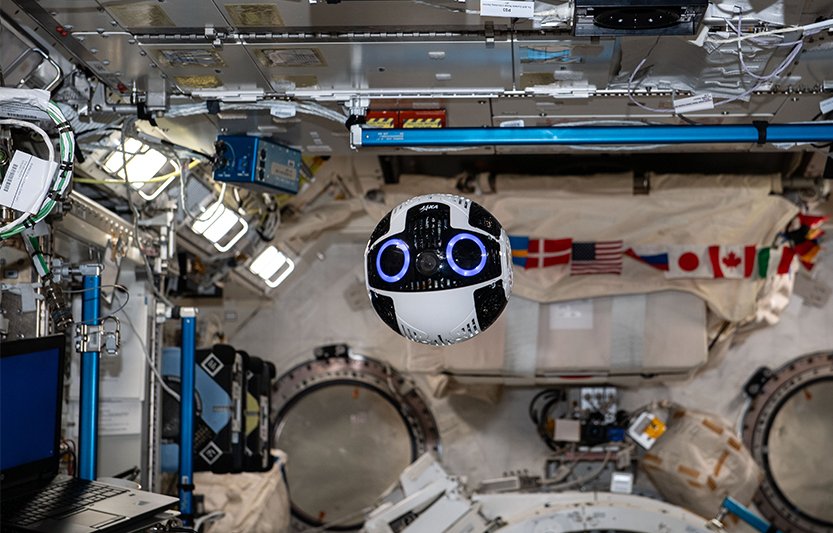
2023年6月、「きぼう」自律移動型船内カメラ「Int-Ball2」が、ドラゴン補給船により宇宙に旅立ちました。「Int-Ball2」は、地上の管制官の操作で国際宇宙ステーション(ISS)内を飛び回り、宇宙飛行士の代わりに写真や動画の撮影を行います。そうすることで宇宙飛行士の作業時間を大幅に削減し、新たな価値を生み出す時間を作ることを目的としています。初号機「Int-Ball」で得た知見をもとに、より強い推力や、リアルタイムで周囲の空間地図を作る能力を持ち、さらには自動でドッキングステーションに戻るなどの改良を加えました。
「Int-Ball2」のプロジェクトマネージャーをしています。これまでは、有人宇宙部門で「きぼう」日本実験棟の開発から打ち上げ、ユーザーに便利に使ってもらうための機能向上などを担当してきました。その中で、きぼうのロボットアームやエアロックの運用技術支援や船内タスクの自動化研究を通じて自動化やロボティクスに深く携わるようになりました。
このプロジェクトでは、最後の仕上げとなるロボットの組み立て(インテグレーション)を担当しました。これまで「きぼう」の実験装置など、開発に数多く関わってきました。学生時代にはNHKが主催するロボットコンテスト第1回に出場しました。ロボットは10個ほど作ったと思います。そういう意味では、「Int-Ball2」は無重力空間で姿勢を制御しながら移動するという、地上ではあり得ない独創的なロボットなので、新鮮な気持ちで携わらせてもらいました。
私は2019年にJAXAに入社し、現在5年目になります。入社当時はすでに「Int-Ball2」がプロジェクト化していて、開発が始まる前後のタイミングでした。自動化・自律化担当として最初の1年はその様子を傍で見させていただき、その後開発・運用を担当しました。学生時代はポーランドと日本の大学で、ロボティクス・ドローンの複数制御などの研究をしていたので、宇宙ドローンの「Int-Ball2」には当初からとても魅力を感じていました。
2022年に入社したので、現在2年目になります。プロジェクトでは最初、開発完了に関わらせていただき、その後運用担当を引き継ぎました。現在は、すでに軌道上にいる「Int-Ball2」の運用調整をメインで担当しています。 学生時代は、皆さんと同じくロボティクスや機械工学などを勉強していました。ロボットサークルにも所属し、友人達と自分たちで作った機械、回路やソフトウエアなどに触れる毎日でした。
私は地元出身なので、子どもの頃から特別公開に訪れたりして「筑波宇宙センター」が身近な存在でした。そういうこともあって、将来はここで仕事をしたいなという想いが芽生えたのだと思います。学生時代は人力飛行機を作って大会に出たりしていました。このプロジェクトでは「Int-Ball2」が自動で充電するための「ドッキングステーション」を担当しています。
私は「Int-Ball2」の飛行制御に関わる機能を主に担当しています。中学生の頃から、宇宙開発に関わりたいと思い描いていましたね。もの作りに目覚めたのは大学に入ってからです。サークルに顔を出したのがきっかけでのめり込んでしまい、そこからは昼夜問わず工作しているような学生時代でした。ロボットは陸海空と色々なものを作っていましたね。
自己紹介の様子(奥左)西下さん、(奥右)和田さん、(画面内)渡辺さん、(手前左)山口さん、(手前右)山本さん、
見る機能の自動化を目指して
Q: 「Int-Ball2」とは、どのようなプロジェクトになりますか。
「Int-Ball2」は「見る機能の自動化」を目指して作られました。地上の管制官の操作で、ISS内の微小重力空間を飛び回り、宇宙飛行士の代わりに写真や動画の撮影を行います。実際宇宙飛行士が撮影しようとすると、カメラを取り出して、セットアップして、固定して‥‥と手間がかかりますが、「Int-Ball2」なら、すべて地上から指示して行うことができます。
「Int-Ball2」が稼働することで、「きぼう」船内の宇宙飛行士の作業時間をより有効活用できると考えています。ロボット・遠隔操作技術を導入することで宇宙飛行士の作業時間を減らせれば、その空いた時間に、価値のある別の実験や作業ができるようになります。
プロジェクトについて語る山口さん
そうですよね。初号機の「Int-Ball」は、微小重力空間で、基本的な姿勢や移動の制御ができることを確認しました。「Int-Ball2」では、さらに自動でドッキングステーションに戻り充電できたり、絶えず気流のあるISS内で姿勢を制御するための強い推力を持たせるなどの機能改良を行っています。
ピタッとはまったドッキングに感動
Q:「Int-Ball2」は、2023年6月ドラゴン補給船で宇宙へ飛び立ち、現在はISSでの本格稼働に向けて調整が進んでいます。プロジェクトを進める中でつらかった事や、喜びはありますか。
「ドッキングステーション」は、このお皿のようになっている部分が前後に動くのですが、お皿の奥と「Int-Ball2」にそれぞれ取り付けられている磁石の力によって、「Int-Ball2」の位置を合わせながらお皿ごと引っ張りこんでドッキングできるような仕組みになっています。この「Int-Ball2」がやってきたときの位置ずれがどの程度までであればドッキングを保証できるのかを、地上で事前に検証する必要がありました。そこで、エアホッケーのように空気の力によって平らな面上の物体を滑らかに動かせる装置を使って、「Int-Ball2」の位置を少しずつ変えて、多分2000回くらいは検証したと思います。検証中の装置の操作は、基本的には決まった動作のくり返しです。機体の動きを記録するために全て動画で撮っていたのですが、やっているうちに段々リズム感が出てきて、気がついたら、娘の好きなアニメの主題歌を口ずさんでいるところまで記録されてしまっていたのには驚きました。笑
ドッキングステーションについて語る(左)渡邉さん
正直、最初私は「微小重力空間で、本当に磁石だけでドッキングできるのか」と不安だったんです。というのも、宇宙で「ドッキング」というと、もっと機械的にガシッと固定するイメージがありましたし、3次元空間で磁石だけの力で持っていけるのか?と確信が持てなかったのです。でも、地上の実験では期待以上にうまくいきましたし、それが宇宙でも見事にピタッとはまったときは、素晴らしい設計だと思いましたね。
たしか、最初に3Dプリンターの試作品を和田さんにお見せしたとき、「素敵な機構だね」と褒めていただいた記憶があるのですが、実は少し心配なところもあったのですね。
いやいや。(笑) 地上で成功していたので、これはいける!と思っていましたよ。
「Int-Ball2」では、コストを下げるチャレンジの意味合いもあり、民生品を多く使っています。一般に売られているような製品を組み合わせているので、実際にそれらを最後に組み合わせようとすると、最初は起動できないなどから始まり、不具合が出て大変でした。パーツの隙間要素をなんとか埋めて繋げて、2年以上かけて、開発完了することができました。もちろん嬉しかったですが、出来上がって、ホッとしたというのが正直なところかもしれません。
プロジェクトの苦労と喜びについて語る(画面内)渡辺さん
もともと民生品を組み合わせるのも苦労しましたが、小さい機体に部品を収めるのも難しかったですね。不具合が出て、設計変更の為にもう少し大きくしたいと思っても、筐体の大きさが、制約になっていたんですよね。特にバッテリーは苦労しましたね。
バッテリーについても、有人宇宙機の高い安全要求に適合するようなものを作る必要がありましたが、最初は技術的に作れる国内企業がなかなか見つからず、海外の企業に対し製品を改修してもらいシステムに組み込む作業を続けていましたが、なかなか要求に適合するバッテリが作れず、何度か開発スケジュールの見直しを図りながら、ようやく技術力のある会社に出会えたという感じでした。渡辺(英)さんも言ってくれたように開発中にバッテリとその他の装置間で電気的に整合がとれない所が沢山出てきたのですが、JAXAインテグレーション方式での開発だったため、ここにいないメンバーも含めてJAXAメンバーの総力で取り組んで、何とかコストとスケジュールの範囲内で成り立つ案を模索し続けた開発でした。だからこそ出来上がった時は本当にほっとしたし、ドッキングが高い精度でうまくいったときは嬉しかったですね。
私は現在初期運用中の「Int-Ball2」の取り纏めを担当させてもらっていますが、実際の運用の中で「Int-Ball2」の操作をするのは、専門の運用チームの方々です。私たち開発側のチームは、「軌道上で、こういうことを確認したい」 という要望を、運用専門のチームと調整しながら、それらを実際の運用計画と手順に落とし込んでいくのが仕事です。
運用専門のプロフェッショナルたちが、我々の要望と運用側の制約との間をうまく調整して提案してくださるので、いつも助けられているなと感じています。
僕が一番印象に残っているのは、機体を組み上げた状態で機能検証を行っていたときのことです。各担当者が開発仕様を満足しているかどうかを一つずつチェックしていき、全項目で問題なし!と思ったタイミングで、渡邊(恵)さんが「メインカメラが、ピンボケしてない?」とぎりぎりで発見して。技術的に難しい飛行機能に目が行き過ぎて、カメラロボットとして一番重要なところを見落としてしまっていたというところで、急いで分解して調整したこともありましたね。
プロジェクトについて語る(真ん中)西下さん
結局、メインカメラが遠視のような状態になっていたんです。それに気がついた時は、たしか開発完了審査会の1,2週間前だったと思います。夜に相談を受けて、老眼鏡を持っている職員さんを探して、カメラ部分に充てて見たら、あ、ピントが合ったね、ちゃんと見えるねと。そこから急いで分解して調整して、なんとか審査会に間に合わせました。
「Gateway」や月面にも。技術をつないでいきたい
Q:このプロジェクトでの、個人的な目標があれば教えてください。
2024年度以降から段階的に、宇宙飛行士の方にも実験の撮影などで使用してもらうことを目標に、そのために今、調整を進めています。動いた、止まった!という個々の機能の確認作業の世界から、カメラとして毎日使ってもらえる世界への移行を目指しています。
プロジェクトでの目標について語る山本さん
今回、私はドッキングステーションを担当したのですが、今後は「Int-Ball」本体の開発にもぜひ関わっていきたいです。研究開発部門からも、拡張機能を利用したおもしろい提案ができることを楽しみにしています。
初号機「Int-Ball」での経験が「Int-Ball2」に引き継がれて、今ISSでその技術を試せるチャンスが生まれているので、この知見をどんどん次につなげていきたいです。例えば、月周回有人拠点「Gateway」や月面などもっと遠くに人が行く前に、様々な最新技術をISSで試していきたいですね。
「Int-Ball2」は無線LANのWi-Fiがあれば飛ぶことができるので、「Gateway」に適用がしやすいハードウエアです。「Gateway」や、月面での探査拠点などでは、常に人が滞在しない可能性もあるので、今後「Int-Ball」が月面探査で活躍する可能性は大いにありそうですね。
具体的なロボットの形や任せるタスクは様々あるかもしれませんが、確実にここでの経験・要素技術は将来の有人宇宙活動に繋がっていくと期待しています。
「Int-Ball」を実運用に役立ててほしい、もっと便利に感じてもらえるロボットにしたいという思いがあります。その意味では、例えばボタン一つで好きなところに行けて、撮影して戻ってくる。そういった操作の簡略化についても興味がありますね。「Int-Ball」の自律飛行機能をどんどん発展させていきたいと思います。
日頃、渡辺(英)さんもよく言ってくれていますが、このプロジェクトは、若い人たちが短いサイクルで実際にもの作りを検討して開発するのに非常にいい機会だと思っています。宇宙に開発したものを持っていって運用して、さらに次の課題を見つけて機能向上させていく。そういうサイクルを回す機会が得られるという点で、とても重要なプロジェクトです。引き続き機能拡張や機会があれば次号機開発などで、若い人たちが、自分たちの能力を上げ経験を積む場にしてほしいです。
飛行チェックアウト中のJEM船内可搬型ビデオカメラシステム実証2号機(Int-Ball2) Image by JAXA/NASA
Q:次回のリレートークは、「有人与圧ローバ」プロジェクトのチームにお願いする予定です。メッセージをお願いできますか。
「有人与圧ローバ」プロジェクトは、次の月社会実現に向けたJAXAの大きなプロジェクトだと思います。そこで「きぼう」の技術が使えるように、私たちも頑張りますので、よろしくお願いします!
メンバープロフィール
和田 勝(わだ まさる)
有人宇宙技術部門 有人与圧ローバエンジニアリングセンター 技術領域主幹
経歴
自動車会社を経てJAXAに中途入社。
趣味
卓球、(時々)楽器演奏、(たまに)絵画鑑賞
座右の銘
自分自身の好きな言葉は「Vision、Passion、and Action!」。
渡辺 英幸(わたなべ ひでゆき)
有人宇宙技術部門 有人宇宙技術センター 主任研究開発員
経歴
宇宙開発により東西の壁を越えた国際宇宙ステーション(ISS)に惚れこみ、1995年入社以来、宇宙ステーションに係る業務に全力を尽くしてきた。
趣味
カーレース参戦
座右の銘
自分の発言には責任を持とう
渡邊 恵佑(わたなべ けいすけ)
研究開発部門 第二研究ユニット 主任研究開発員
経歴
2012年に入社後、研究開発部門で宇宙ロボティクスの研究に従事する。第一宇宙技術部門に移って準天頂衛星「みちびき」を利用した移動ロボットの高精度測位の研究開発に取り組んだのち、2017 年から再び研究開発部門で勤務。Int-Ball2 では立ち上げ時からドッキング機構を担当。
趣味
トレッキング、自転車通勤、DIY
座右の銘
Fere libenter homines id quod volunt credunt.(およそ人は自分が欲することを勝手に信じてしまう)
西下 敦青(にしした たいせい)
研究開発部門 第一研究ユニット 研究開発員
経歴
2020年に入社し,宇宙機の航法誘導制御や宇宙ロボティクスに関する研究開発に従事。主な業務はデブリ除去衛星用相対航法の研究、機械式冷凍機の擾乱低減制御理論研究、荷物搬送ロボットの開発など。Int-Ball2ミッションでは誘導制御機能を主に担当し、地上試験検証やISS軌道上データ解析といった業務に携わる。
趣味
スポーツ:元野球部.最近テニスが楽しい
座右の銘
意外と何とかなる
山本 竜也(やまもと たつや)
有人宇宙技術部門 有人宇宙技術センター 研究開発員
経歴
2022年入社。入社当初よりInt-Ball2の開発に携わり、2023年度からは主担当として運用業務に従事する。その他には「きぼう」の船外ロボットアームの補用品開発や船内荷物管理技術の研究なども担当。
趣味
手を動かすこと
座右の銘
ないものは作る
山口 正光ピヨトル(やまぐち せいこうぴよとる)
有人宇宙技術部門 有人与圧ローバエンジニアリングセンター 研究開発員
経歴
2019年入社。入社以来有人宇宙技術センターにて有人宇宙活動の自動化・自律化研究と国際宇宙ステーション「きぼう」のシステムインテグレーション業務を担当。2023年11月から有人与圧ローバーエンジニアリングセンター主務。
趣味
旅行、料理、犬との散歩
座右の銘
Invent and Simplify