HourglassInvestigation for gravity dependence of soft terrain on planetary surface
| 宇宙利用/実験期間 | 2020年 ~ 2020年 | ||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 研究目的 | Hourglassミッションでは国際宇宙ステーション(ISS)・「きぼう」日本実験棟に搭載された人工重力発生装置により生み出される低重力環境下で月の模擬レゴリス等の粉粒体がどのような挙動を示すかを調査します。 | ||||||||||||||||||||||||||||||||||||
| 宇宙利用/実験内容 | 人工重力発生装置で地球の重力の0.06~2倍の人工重力を一定時間ごとに十数通り発生させます。各人工重力下で砂時計とメスシリンダに封入された粉粒体がどのように落下するのか、落下した後にどのように積もるのかをカメラで撮影、SDカードに記録します。SDカードは実験終了後に地上に回収され、研究者がデータを解析します。 また、実験では月の模擬砂以外にも火星・火星惑星の模擬砂、地球の砂(豊浦砂・珪砂)、アルミナビーズの8種類の粉粒体を使用します。各種粉粒体の選定理由は様々で、例えば月や火星の模擬砂は、月や火星がJAXAの将来の探査目的地になる可能性があり、表層の砂の挙動を明らかにする必要があるために選ばれました。 | ||||||||||||||||||||||||||||||||||||
| 期待される利用/研究成果 | 静的かつ長期的な低重力環境下で砂の挙動を調べる実験をした例は少なく、実験で得られるデータセットは世界的に見ても価値が高いといえます。 実験結果は月・惑星土質力学や、レゴリス-機械の接触解析( x-Terramechanics )の構築に役立てられ、将来的には宇宙探査ミッションに使用されるローバや着陸機などの設計に必要なシミュレーショパラメータの取得にも貢献することが期待されます。 | ||||||||||||||||||||||||||||||||||||
| 関連トピックス | |||||||||||||||||||||||||||||||||||||
|
詳細
研究代表者
研究分担者
要旨世界中で月や火星の探査活動への関心が集まっています。JAXAでも人を乗せて月を走行する車(ローバ)や、火星の月(衛星)であるフォボスを探査するための探査機の開発が進められており、将来はこれらのローバや探査機を使った探査を実施する予定です。 月や火星上に降り立つローバや着陸機を開発するためには、月や火星の環境についてよく知ることがまず求められます。様々な点が地球と月・火星とで異なることが知られていますが、ローバや着陸機が降り立つ惑星表面の機械的な特性もその一つです。 
図1はアポロ16号で月に行ったCharlie Duke宇宙飛行士が撮影した月面の様子です。地表が砂のようなもので覆われているのが見て取れます。この砂は月レゴリスと呼ばれています。月レゴリスは月面への隕石の衝突や宇宙風化作用によって月の岩盤が破砕され、砂礫や微粒子となり、月面に堆積したもので、月の表面を数センチから数10センチの厚さで覆っています[M.Horie, et al., (2015)]。そして月レゴリスは厚く、緩く積もっています。このような月レゴリスの上をローバが走れば、スタック(車輪の回転により路面を掘り沈み込み,その場から動けなくなる現象)を生じる危険性があります[K.Iizuka, et al., (2012)]。地球上でも、車で砂浜に入ったところタイヤがはまり二進も三進も行けなくなってしまうことがありますが、月面の走りにくさはあの状況をイメージすると近いかもしれません。着陸機であれば、機体を安定した姿勢で月面に着陸させることが難しいといえます。この難しさは、砂浜でジャンプしてみれば分かるかもしれません。火星の地表を覆うレゴリス上の走行や着陸も、月と同様に難しいことが知られています。 このように、月や火星等の探査の成功の鍵となる安定して動作するローバや着陸機を開発するためには、惑星表面を覆うレゴリスの滑りやすさや緩さといった特性について詳しく知り、設計に反映させることが重要なのです。レゴリスの特性は、その形状や、重力の大きさが関係していると考えられていますが、レゴリスの特性と重力の関係性について調査した研究はあまり多くありません。Hourglassミッションでは、世界的にみても需要が高い、月や火星を含む8種類の砂やレゴリスの特性を、人工的に作り出した重力環境下で調査する実験を行いました。 実験の概要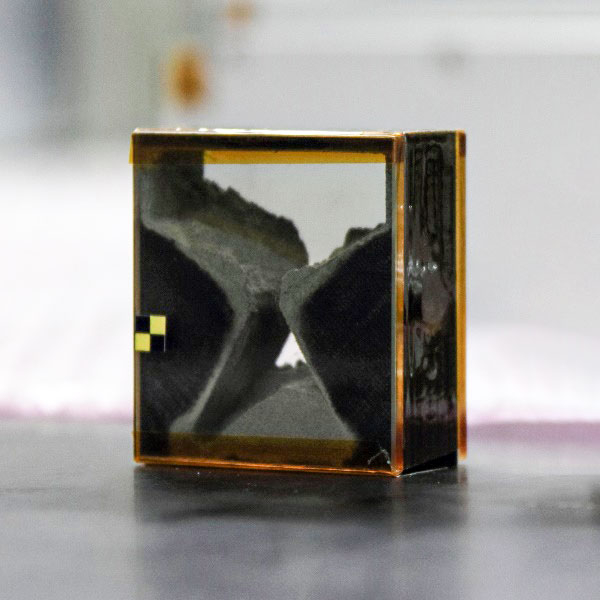
Hourglassミッションでは、「きぼう」日本実験棟に設置された人工重力発生装置を用いて地球の0.1倍から2倍の重力環境を作り出します。様々な重力環境下において、砂時計とメスシリンダ型の容器に封入された月や火星の模擬レゴリスを含む8種類の粉粒体の挙動を撮像します。 砂時計Hourglassミッションを象徴するのが、実験で使用する「砂時計」型の容器です。図2は、粉粒体の種類別に8個ある砂時計のうち、月の模擬レゴリスが封じ込められたものです。砂時計の中は大気のない月と同じく真空になっています。この砂時計型の容器は人工重力発生装置に搭載され、月の重力(地球重力の1/6)を含む様々な重力環境下に置かれます。実験中の砂時計の中は、正しく「スモールサイズの月面」なのです。 砂時計の中身砂時計の中の8種類の粉粒体を紹介します。表1に示すように、8種類の粉粒体の中には月や火星の模擬レゴリスの他にも、アルミナビーズや地球の砂が含まれています。粉粒体の実物は図3に示しています。粉粒体にはそれぞれ選定された理由があります。また、表の#の番号が小さい程、実験における優先度が高い試料になります。優先順は、解析のしやすさや将来計画の有無によって定めています。 表1 実験で使用する8種類の粉粒体
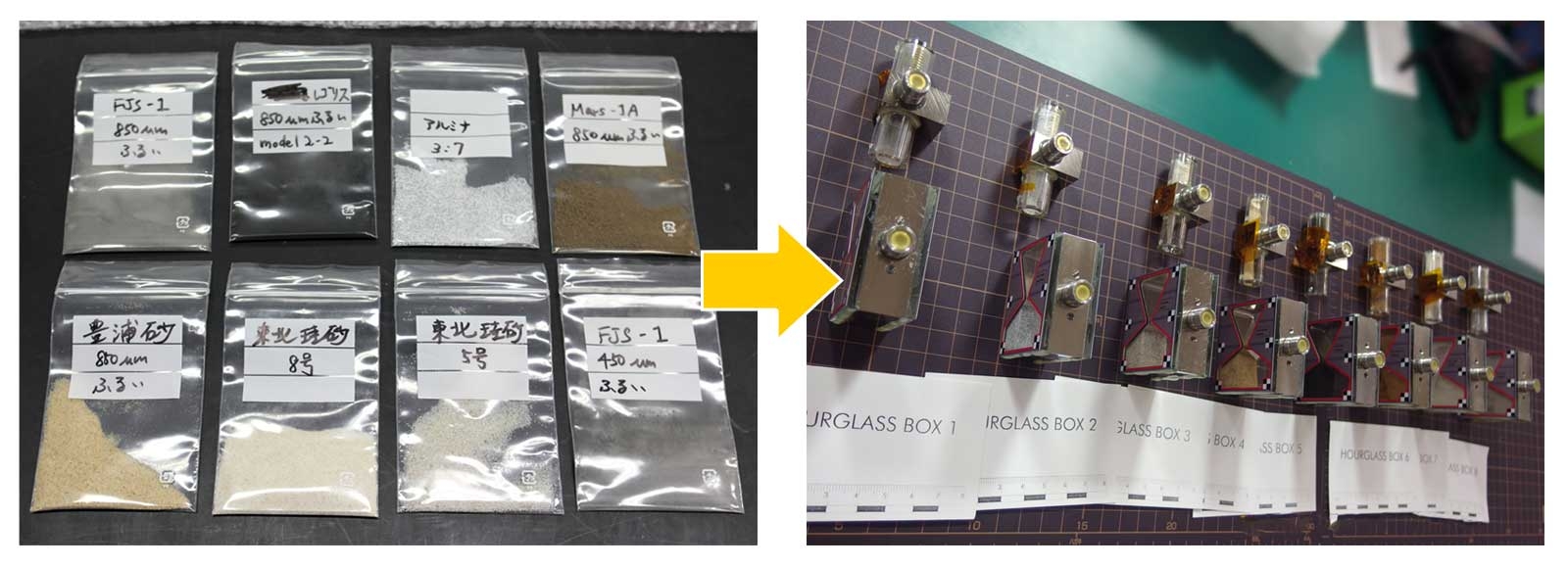
実験装置Hourglass BoxHourglass BoxはHourglassミッション専用の実験装置で、人工重力発生装置に設置できるよう設計されています。図4で示すように前項で紹介した砂時計とメスシリンダ型の容器が内蔵されており、それらをサーボモータで1分毎に180度反転させ、その様子をカメラで撮影します。撮影されたデータは実験装置内のSDカードに保存されます。また模擬重力を計測するため、三軸加速度センサも搭載しています。図5のように、Hourglass Boxは粉粒体別に8台用意しました。 実験終了後、SDカードは宇宙飛行士によりHourglass Boxから「きぼう」船内に備え付けのラップトップに移され、地上からリモートデスクトップによる操作でデータをダウンリンクします。あるいは、SDカードを国際宇宙ステーションに年に数回訪れる回収便に乗せて回収することもあります。 
Hourglass Box内のカメラで砂時計とメスシリンダを撮影した動画です。動画1は地上で撮影したため、あっという間に容器内のアルミナビーズが落ちています。低重力下では粉粒体がそれぞれどのような動きを見せるか、結果が楽しみです。 
人工重力発生装置(ターンテーブル)テーブルを任意の回転数で動作させることで、設置した実験装置に対し遠心力方向に人工重力を与えることができます。今回の実験では月や火星の重力値を含む、地球の重力の0.063倍~2.0倍までの重力環境を作り出すため、ターンテーブルを約20rpm ~ 113rpm(1分間に20回転~113回転の速度)で回転させています。図6に人工重力発生装置にHourglass Boxを取り付け、ターンテーブルを回転させるまでの流れを示します。 
期待される成果Hourglassミッションで得られたデータは、要旨で述べた通り、月や火星のレゴリス等の各重力環境下における特性(滑りやすさや、緩さ等)を調べる目的で様々な手法を用いて解析されます。例えば、実験データにおいて確認できる、砂時計が反転した際に粉粒体が積もってできる山の角度は土質力学の分野において「安息角」と呼ばれます(図7)。安息角の大きさにより、各重力環境下における、砂の滑りにくさの特性を知ることができます(図7)。メスシリンダの映像からは、砂がメスシリンダに振られている目盛りのどの高さで積もるかを確認できます。これにより各重力環境下において粉粒体がどの程度の緩さで堆積するのか、「かさ密度」として定量的に評価することができます。 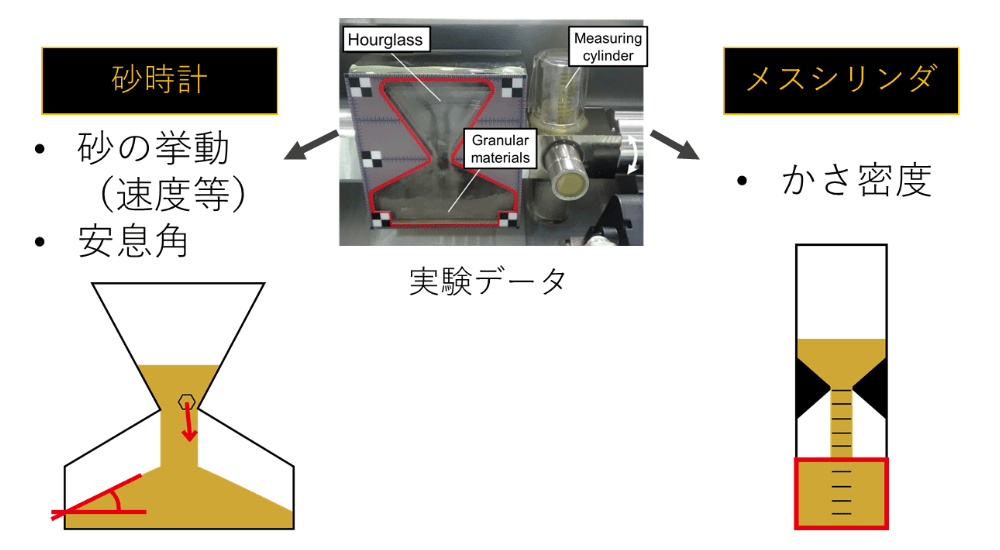
このような基礎的な月や火星のレゴリス等の各重力環境下における特性は、以下のような様々な分野に応用され役立てられると期待しています。
HourglassミッションはRun1、Run2の2回に分けて実施されました。Run1は2019年1月、Run2は2020年5月に予定通り完了し、現在は研究チームによって実験データの解析が進められています。 参考資料関連リンク
|
|||||||||||||||||||||||||||||||||||||
|
研究論文(Publication)
|
|||||||||||||||||||||||||||||||||||||

大槻 真嗣 OTSUKI Masatsugu
JAXA 宇宙科学研究所 准教授
2005年3月慶應義塾大学大学院理工学研究科後期博士課程修了。2002年4月より同大理工学部システムデザイン工学科助手。2006年11月より宇宙航空研究開発機構 宇宙科学研究所助教。2014年より2015年まで米国カリフォルニア工科大学ジェット推進研究所Research Affiliate。2019年より現職。主に惑星探査ローバのモビリティ、着陸ダイナミクスの制御、宇宙用アクチュエータの研究に従事。
2012年度日本機械学会奨励賞(研究)、2014年度日本ロボット学会功労賞などを受賞。博士(工学)。日本機械学会、日本ロボット学会などの会員。



