Int-Ball2 ROS/Gazebo simulation environment is now public for open-source software usage.
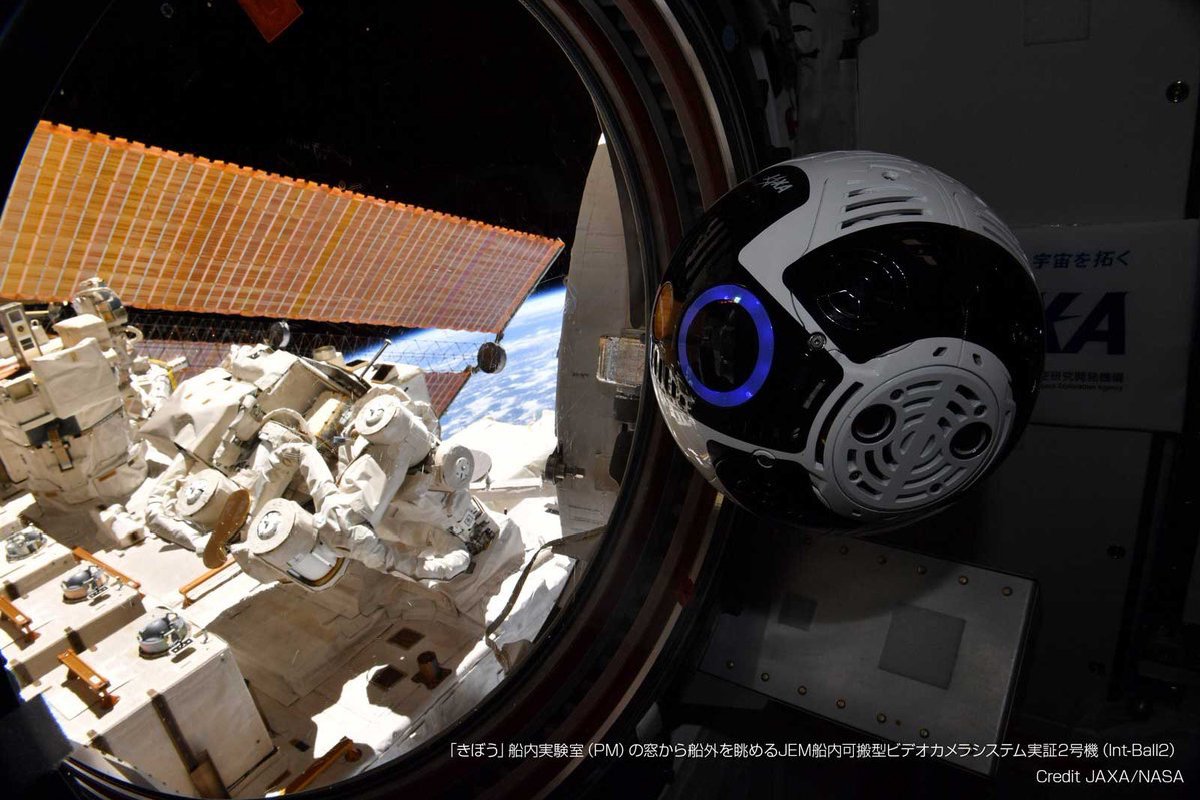
Int-Ball2, the free-flying camera robot deployed in the Japanese Experiment Module (JEM) "Kibo" on the International Space Station (ISS), features a ROS based user programming environment. ROS/Gazebo simulator for user programming is now publicly released.
Int-Ball2, the free-flying camera robot deployed in the Japanese Experiment Module (JEM) "Kibo" on the International Space Station (ISS), features a ROS based user programming environment. ROS/Gazebo simulator for user programming is now publicly released.
Access the Int-Ball2 Simulator on GitHub
About Int-Ball2
Int-Ball2 assists astronauts with imagery tasks aboard the ISS "Kibo" with free-flying capability in micro-gravity. Int-Ball2 assists astronauts by taking over routine photography and videography tasks. This allows astronauts to focus on more complex and mission-critical activities, thereby increasing overall efficiency.
In addition, Int-Ball2 can also serve as a technological demonstration platform where external users can integrate and execute their own programs on the ISS. The open-source simulator replicates the behavior of the Int-Ball2 user programming platform. This allows users to create, implement, and verify their own programs within the simulated environment. The Int-Ball2 software is built on the widely-used Robot Operating System (ROS) middleware, and the simulation environment is developed using Gazebo, also an open-source platform.
In addition, Int-Ball2 can also serve as a technological demonstration platform where external users can integrate and execute their own programs on the ISS. The open-source simulator replicates the behavior of the Int-Ball2 user programming platform. This allows users to create, implement, and verify their own programs within the simulated environment. The Int-Ball2 software is built on the widely-used Robot Operating System (ROS) middleware, and the simulation environment is developed using Gazebo, also an open-source platform.
We believe the release of this simulator will accelerate research in space robotics, promote STEM education, and inspire new ideas for innovations. By making it open-source, we invite the public to interact with Int-Ball2, contribute their ideas, and work together to enhance its functionalities.
Related information:

Related News
-
 2025.11.13
2025.11.13- Announcements
The Asian Try Zero-G 2025 Flight Items were Launched!- Experiment at Kibo
- Kibo Utilization Office for Asia (KUOA)
-
 2025.10.14
2025.10.14- Announcements
Three CubeSats successfully deployed from "Kibo"!- Experiment at Kibo
-
 2025.10.01
2025.10.01- Announcements
The preliminary rounds for the 6th Kibo Robot Programming Challenge were held in each participating country and region!- Experiment at Kibo
- Kibo Utilization Office for Asia (KUOA)
-
 2025.09.29
2025.09.29- Announcements
3 CubeSats will be deployed from “Kibo” Japanese Experiment Module on Friday, October 10th, 2025.- Experiment at Kibo
-
 2025.09.22
2025.09.22- Announcements
Five CubeSats successfully deployed from "Kibo"!- Experiment at Kibo
Unless specified otherwise, rights to all images belong to ©JAXA